Простыми словами о современных эхолокационных технологиях, или что такое BroadBand, DownScan, StructureScan, CHIRP
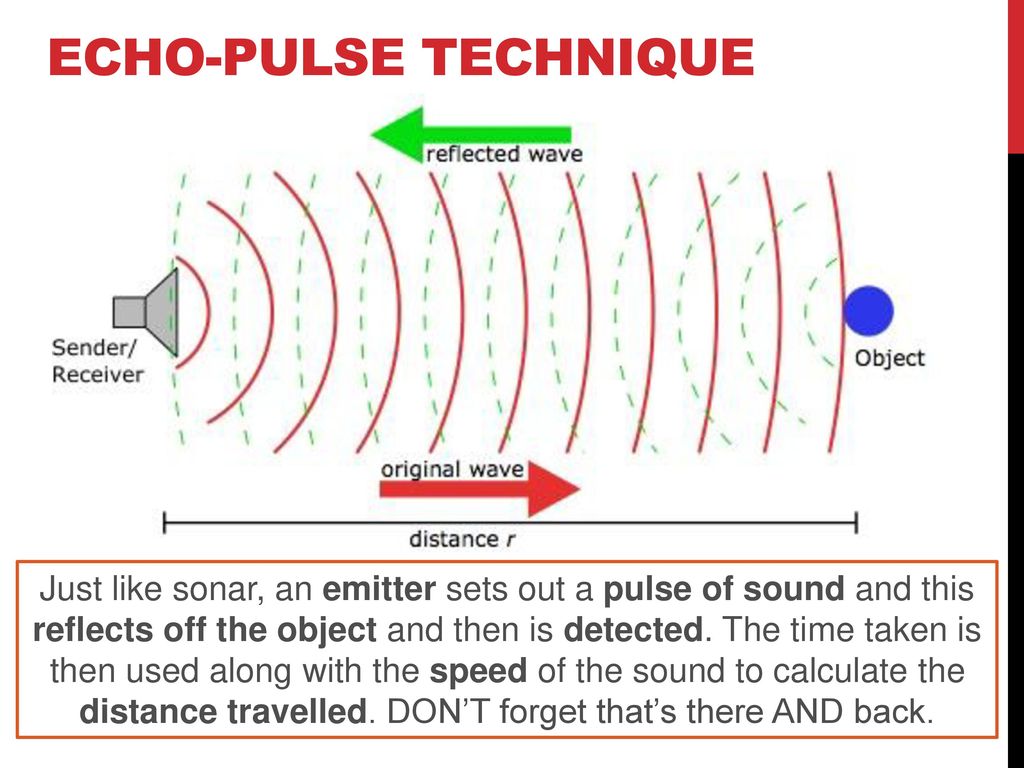
Принцип работы эхолота прост. Датчик излучает в воду ультразвуковой сигнал. Тот доходит до препятствия и отражается от него. Датчик принимает отраженный сигнал и фиксирует время, которое прошло между излучением и приемом t. Зная скорость распространения звука в воде v, можно посчитать расстояние до препятствия по формуле S=v*t/2. Почему делим на два? Потому что сигнал прошел двойное расстояние, туда и обратно.
Однако рыболову, желающему в наше время впервые приобрести эхолот, приходится сталкиваться с большим количеством непонятных терминов. 2D сонар с чирпом, даунскан, SideVü, голова идет кругом, и жалко тратить время для перелопачивания большого количества интернет-ресурсов, чтобы во всем разобраться. Поэтому мы решили написать статью, в которой простым языком, в одном месте и по возможности кратко будет рассказано обо всех этих чудесах эхолокации.
Старая добрая классика: Broadband, 2D Sonar
Начнем мы сначала, с классического эхолота. То, что теперь называется BroadBand, 2D, эхолот, широкополосный эхолот, сонар, классический сонар. Технология старая, но не потерявшая своей актуальности! В чем ее особенность?
То, что теперь называется BroadBand, 2D, эхолот, широкополосный эхолот, сонар, классический сонар. Технология старая, но не потерявшая своей актуальности! В чем ее особенность?
Особенность в том, что датчик излучает сигнал в форме конуса. Выглядит это примерно так:
Рис.1 Классический двухлучевой эхолот
Здесь показан пример двухлучевого эхолота с лучами 20 и 60 градусов. Более широкий луч просвечивает больший объем воды и видит больше рыбы. Зато в этом луче не видеть ничего на дне, кроме плавного изменения глубины, все детали дна замываются. Узкий луч рисует дно более подробно, чем широкий, но рыбу ищет хуже.
Рыба на экране классического эхолота показывается в виде дуг. На рисунке ниже показано, почему так происходит.
Рис.2 Как формируются дуги
Пусть лодка движется, а рыба неподвижна. Рыба попадает в край луча в точке А, затем проходит через центр В и затем выходит из луча в точке С.
Преимущества классического эхолота: большой объем просвечиваемой датчиком воды, легче найти рыбу, светит глубоко (несколько сотен метров – не проблема).
Недостатки классического эхолота:
- Низкая детализация дна. Все выделяющиеся объекты, размеры которых меньше размера пятна, “подсвечиваемого” на дне, будут видны на экране как плавный холм с размерами около размера пятна. Вся детализация потеряется.
- Невозможно понять, в каком направлении находится рыба или любой объект, от которого отразился сигнал, известно только расстояние до нее.
- Кроме того, недостатком классического эхолота является наличие мертвых зон. Если, например, глубина начинает резко увеличиваться, то сигнал отражается от верхней бровки, а ниже бровки все объекты не показываются.
 Если на ровном дне стоит высокий узкий камень, то сигнал отражается от вершины камня, и рыба, стоящая на дне у камня, не видна.
Если на ровном дне стоит высокий узкий камень, то сигнал отражается от вершины камня, и рыба, стоящая на дне у камня, не видна.
 Если на ровном дне стоит высокий узкий камень, то сигнал отражается от вершины камня, и рыба, стоящая на дне у камня, не видна.
Если на ровном дне стоит высокий узкий камень, то сигнал отражается от вершины камня, и рыба, стоящая на дне у камня, не видна.Рис.3 Мертвая зона
Мертвая зона существует даже при ровном дне. На рисунке показано, какая рыба будет видна на экране эхолота, а какая сохранит свое присутствие в тайне, потому что находится в мертвой зоне.
Что такое нижнее сканирование
Мысль конструкторов не стояла на месте, и несколько лет назад появились принципиально другие эхолоты, форма луча которых напоминает не конус, а дольку лимона.
Рис.4 Форма луча классического эхолота и эхолота нижнего сканирования DownScan
На рисунке представлен пример эхолота, совмещающего в себе один классический луч, и один луч нижнего сканирования. Здесь необходимо сказать, что разные производители по-разному называют эту технологию. У Garmin это СlearVü (Vü – видимо, от View), у Lowrance это DownScan, у Humminbird – DownImage. Но суть везде одна: датчик излучает луч не в форме конуса, а в очень узком в продольном и широком в поперечном направлении. Что получает при этом рыболов, и что он теряет?
Но суть везде одна: датчик излучает луч не в форме конуса, а в очень узком в продольном и широком в поперечном направлении. Что получает при этом рыболов, и что он теряет?
Проще начать с того, что теряется. Объем просвечиваемой воды гораздо меньше, чем в случае классического эхолота. Поэтому, если вы ловите с якоря, в луч будет попадать гораздо меньше рыбы. В продольном направлении угол раствора луча составляет буквально несколько градусов, шаг вперед-назад, и рыба в луч не попадает. При ловле с якоря DownScan ничего не дает, и в этом случае лучше пользоваться обычной классикой.
Совсем другое дело при ловле в движении или во время поиска рыбы. Тут преимущества DownScan проявляются во всей красе. За счет того, что луч в направлении движения лодки очень узкий, разрешение картинки у DownScan гораздо выше, чем у классического эхолота.
Рис.5 Пример картинки с DownScan
Пример картинки с Lowrance Elite DSi. Детализация, при которой на затопленных деревьях видна каждая веточка. Для классического эхолота такая детализация недостижима в принципе. Вместо дерева на экране был бы размытый бугор.
Для классического эхолота такая детализация недостижима в принципе. Вместо дерева на экране был бы размытый бугор.
Рис.6 Еще один пример картинки с DownScan
Еще один пример – упавшее дерево на DownScan. А под ним стоит стая рыб.
Не будем перегружать статью красотами подводного мира, любой желающий может самостоятельно набрать в строке поиска браузера DownScan Imaging и насладиться видами затопленных кораблей, автомобилей, мостов, деревьев, камней и прочего.
Но как же DownScan отображает рыбу? В случае классического эхолота рыба показывалась дугами. Рыба входила в конус, проплывала его за довольно продолжительное время (или конус проходил через рыбу), за это время рисовалась дуга. Теперь конуса нет, луч узкий, при движении лодки рыба попадает в луч на короткое время и тут же выходит из него. И на экране эхолота она видна не как дуга, а как пятно. Стая малька может выглядеть как облачко. Пример ниже.
Рис.7 Рыба на классическом эхолоте и на DownScan
Слева на экране панель классического эхолота, справа – DownScan.
Если рыба крупная, и удачно сориентирована по отношению к лучу, то можно наблюдать и такую картинку:
Рис. 8 Примеры отображения крупных рыб на DownScan
Размер пятна рыбы на экране зависит от времени пересечения рыбой луча DownScan. Чем крупнее рыба, и чем медленнее она движется относительно лодки, тем след крупнее.
Как видите, качество изображения по сравнению с классикой отличается как день от ночи. Необходимо отметить, что для наилучших результатов при использовании технологии DownScan лодка должна двигаться медленно и равномерно, чтобы луч DownScan работал как оптический сенсор копировального аппарата.
Преимущества DownScan
- Детализация.
- Детализация.
- Детализация
Недостатки DownScan:
- Просвечивает меньший объем воды по сравнению с классическим эхолотом.
- Луч DownScan не проникает так глубоко, как луч классического эхолота, всего до 90-100 метров. Для нашей страны и рыбалки в реках и озерах это не очень актуально.
Пример приборов, совмещающих классический сонар и нижнее сканирование: Garmin Striker Vivid 4cv и эхолот-картплоттер Garmin Echomap UHD 63cv.
Что такое боковое сканирование
Возьмем два луча DownScan и направим их не вниз, а направо и налево. Мы получили боковое сканирование. И снова необходимо сказать, что разные производители по-разному называют эту технологию. У Garmin это SideVü, у Lowrance это StructureScan, у Humminbird – SideImage. Названия разные, суть одна.
Рис.9 Форма лучей эхолота с боковым сканированием StructureScan
На рисунке показан пример эхолота, имеющего в арсенале двухлучевую классическую часть и два луча бокового сканирования. На самом деле датчики бокового сканирования обычно включают в себя и нижнее сканирование, но сейчас это неважно. Итак, мы видим два узких луча, светящих в стороны от лодки. Как показать на экране все богатство информации, которую получает теперь эхолот? Для этого придется сменить точку зрения. 🙂 Если в случае классики и нижнего сканирования мы смотрели на толщу воды сбоку, то теперь смотрим на воду сверху. Если раньше лодка на экране находилась вверху справа, а развертка осуществлялась справа налево, то теперь лодка находится в верхней части экрана посередине, а развертка идет вниз.
На самом деле датчики бокового сканирования обычно включают в себя и нижнее сканирование, но сейчас это неважно. Итак, мы видим два узких луча, светящих в стороны от лодки. Как показать на экране все богатство информации, которую получает теперь эхолот? Для этого придется сменить точку зрения. 🙂 Если в случае классики и нижнего сканирования мы смотрели на толщу воды сбоку, то теперь смотрим на воду сверху. Если раньше лодка на экране находилась вверху справа, а развертка осуществлялась справа налево, то теперь лодка находится в верхней части экрана посередине, а развертка идет вниз.
Рассмотрим подробнее, что показывает нам экран эхолота, работающего в режиме StructureScan.
Рис.10 Пример картинки с экрана эхолота с боковым сканированием StructureScan
Вот пример такой картинки. Развертка, напоминаем, сверху вниз, лодка наверху посередине экрана. Формируется такая картинка следующим образом. Столб воды вместе с дном по обе стороны от лодки развертывается в одну плоскость и показывается на экране.
Рис.11 Как формируется картинка на экране StructureScan — что чему соответствует
В результате от середины (A) экрана в обе стороны до точки (С) показан столб воды (B) под лодкой. Он отображен темной полосой посередине экрана. Полуширина этой полосы равна глубине. На нашем примере на рис. 10 глубина составляет примерно 30 футов. Дальше к краям экрана уходит дно. Обратите внимание, что стоящие на нем объекты отбрасывают тени, как будто мы светим фонарем в стороны от лодки. Собственно, мы им и светим, только фонарь у нас не оптический, а ультразвуковой. Более светлые места на экране – это участки, от которых луч отразился сильнее. Темные участки – это тени от возвышающихся объектов, от них луч отразился слабее. Получается будто мы смотрим на осушенное дно сверху, подсвечивая его сбоку, видим все объекты на дне с отбрасываемыми ими тенями, а вода куда-то исчезла. На нашем примере на рис. 10 слева от лодки мы видим крупные валуны и стволы деревьев, а справа – отдельно стоящие затопленные деревья с ветками.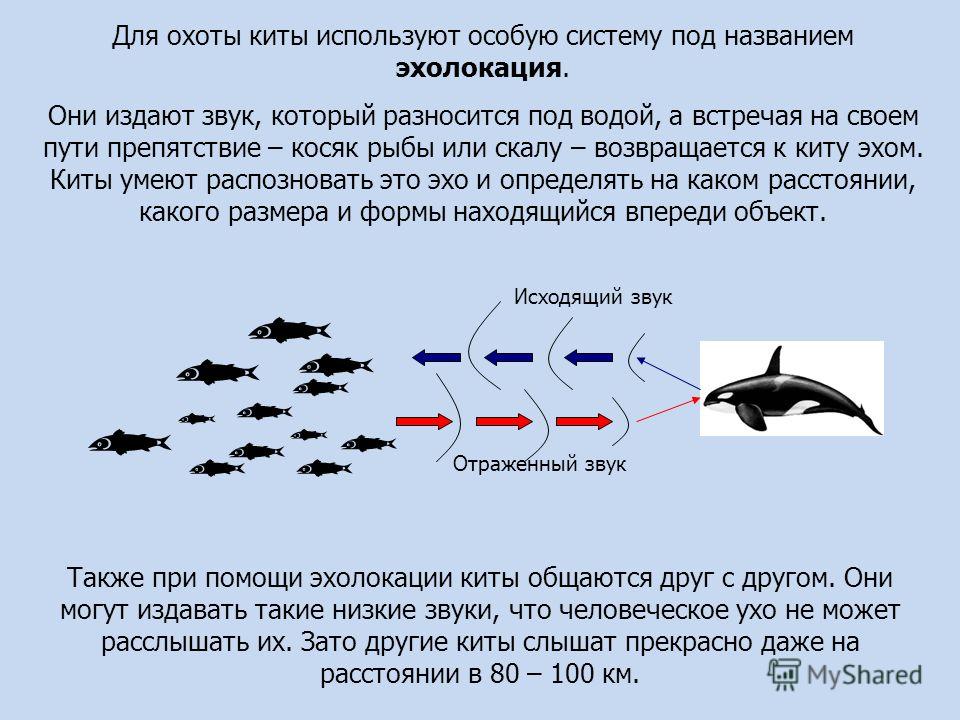
Как и в случае с DownScan, отсылаем читателя в поиск по интернету для ознакомления с другими красивыми картинками со StructureScan, здесь лишь кратко остановимся на том, как StructureScan показывает рыбу.
Рис. 12 Стаи рыбешки на StructureScan
Стаи рыбьей мелочи прямо под лодкой на StructureScan (слева), DownScan (справа наверху) и классический эхолот (справа внизу). Автор снимка предполагает, что форма этих стай в виде полумесяцев прямо указывает на то, что на мелкую рыбу охотится крупная рыба, и мелочь старается увернуться. Помним видео охоты марлинов на стаю мелкой сельди, и как стая изменяет форму при атаках хищника? Вот тут тоже самое.
Рис.12 Рыба в боковых лучах StructureScan
На рис.12 глубина около 15 футов. Слева в боковом луче видна стая рыбы в толще воды (в толще, потому что теней не видно, они за границей экрана). Справа видны светлые черточки с тенями – более крупная рыба у дна.
Как видно из приведенных примеров, идентификация рыбы на DownScan и StructureScan более сложна, чем на классическом эхолоте.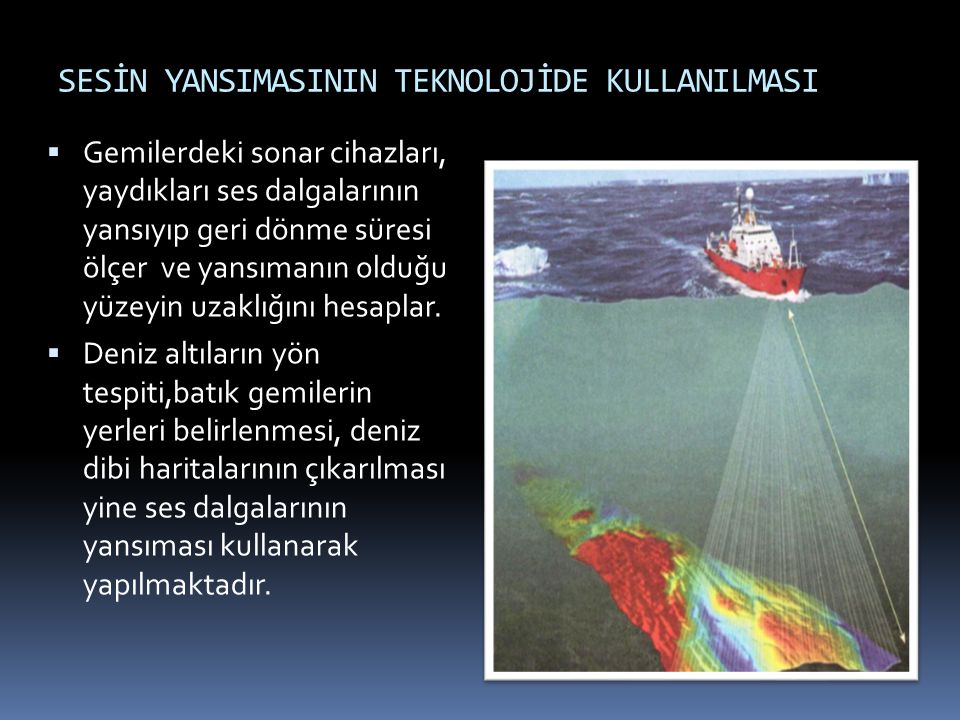 Тут вам нет никаких четких дуг, и тем более режима Fish ID. Интерпретация картинки требует определенного опыта. Здесь я не буду распространяться далее на эту тему, желающим узнать больше советую познакомиться со статьями Сергея Никулина “Видовая идентификация рыб с помощью рыбопоисковых технологий Lowrance” и “StructureScan: next level”.
Тут вам нет никаких четких дуг, и тем более режима Fish ID. Интерпретация картинки требует определенного опыта. Здесь я не буду распространяться далее на эту тему, желающим узнать больше советую познакомиться со статьями Сергея Никулина “Видовая идентификация рыб с помощью рыбопоисковых технологий Lowrance” и “StructureScan: next level”.
Примеры эхолотов/картплоттеров с технологией StructureScan: Lowrance Elite-7 Ti2 с датчиком Active Imaging 3-in-1, картплоттер Lowrance HDS-9 Live c датчиком Active Imaging 3-in-1.
Что такое CHIRP?
Ну и наконец последнее, о чем мы поговорим в этой статье, это технология CHIRP. Предыдущие технологии отличались друг от друга формой и направлением луча. CHIRP же – это не про луч, а про частоту излучения сигнала. CHIRP расшифровывается как Compressed High-Intensity Radiated Pulse — сжатый высоко-интенсивный излученный импульс. Эхолот без CHIRP излучает короткие импульсы на одной частоте. Эхолот CHIRP излучает более длинный сигнал в диапазоне частот (частотно-модулированный сигнал).
Эхолот CHIRP излучает более длинный сигнал в диапазоне частот (частотно-модулированный сигнал).
Что это дает рыболову? Прибор обрабатывает отраженный сигнал сразу на нескольких частотах и извлекает из него больше информации. По утверждению производителей при этом улучшается шумоподавление, растет чувствительность, становится возможным различать рядом стоящих отдельных рыб (улучшается разделение целей). На практике же разница между эхолотами без CHIRP и с ним невелика, особенно на небольших глубинах. По крайней мере нам не удалось найти источники, в которых ясно демонстрируется безоговорочное преимущество CHIRP в сравнительном анализе с эхолотом без CHIRP.
Рис. 13 Сравнение CHIRP и не CHIRP
На рис. 13 показан пример сравнения . Слева – картинка с CHIRP, справа – с обычного эхолота на частоте 145 кГц. Никакой разницы не видно. У дна стоит стая некрупной рыбы.
В настоящее время практически все эхолоты используют технологию CHIRP, причем как в классическом сонаре, так и в нижнем и боковом сканированиях.
Заключение
Цель статьи – дать краткое описание современных эхолокационных технологий, используемых в современных эхолотах, со сжатым описанием их возможностей. Надеемся, что эта цель достигнута. Нужно понимать, что тема эта очень обширна, написано множество статей, описаний, а на рыболовных форумах темы с обсуждениями способов использования и совместного разглядывания картинок с DS и SS занимают не одну сотню страниц. Мы же надеемся, что после прочтения этой статьи читатель не будет путаться в терминологии и спокойно разберется в заинтересовавших его тонкостях. Ну а за покупкой добро пожаловать к нам, в Санкт-Петербург, в магазин эхолотов и картплоттеров http://echolot-spb.ru.
С этим файлом связано 3 файл(ов). Среди них: диагнозы.doc, Nobelevskie_premii.docx, Ринит,БА.  docx. docx.Показать все связанные файлы Подборка по базе: Лабораторная Работа 1 ООП Талгатов М ИС-20-3.docx, Контрольная работа по математике 3 кл. вводная.docx, Самостоятельная работа по теме 3.2.docx, курсовая работа Рябых Пб-!00 испр.docx, Практическая работа№3.doc, Самостоятельная работа по теме 2.6.docx, Самостоятельная работа по теме 2.7.docx, Самостоятельная работа по теме 3.1..docx, Практическая работа 1.docx, Лабораторная работа №1.docx 1 2 3 4 5 6 Часть энергии волны, падающей на границу раздела двух сред (1 и 2), различных по физическим свойствам, отражается обратно в первую среду под углом , равным углу падения (рис. 2).Отношение
интенсивности отраженной волны () к интенсивности падающей волны () носит название коэффициента отражения R. Величина коэффициента отражения зависит от различия плотностей и упругих свойств сред 1 и 2 и равна (при нормальном падении)
где и плотности сред 1 и 2; и скорости распространения волны в 1-ой и 2-ой средах соответственно.  При этом величина При этом величина(4) носит название акустического сопротивления. Если сопротивления сред 1 и 2 сильно отличаются друг от друга ( или ), то R 1, то есть практически вся энергия падающей волны отражается обратно в первую среду. Так, например, обстоит дело на границе воздуха (z 0,0043 кг/м2сек) с водой (z 1,5 кг/м2сек) или с большинством твердых и жидких сред. Явление отражения УЗ-волны от границы различных гистологических структур (жир мышца, мышца кость и т.п.) и патологических неоднородностей (опухолей, камней в печени и др.) используется в основном методе УЗ-диагностики методе эхолокации. Другая часть энергии падающей волны (см. рис. 2), преломившись, начнет распространяться в среде 2 под углом , определяемым обычным соотношением законом преломления.
Изменение направления УЗ-волны при переходе в другую среду используется, например, в «акустических линзах» (рис.  3), применяемых в технике и медицине для «фокусировки» УЗ-энергии на малой площади. 3), применяемых в технике и медицине для «фокусировки» УЗ-энергии на малой площади.5. Генерация и прием УЗ-волн. Методы трансмиссии и эхолокации УЗ-сигнала Источниками ультразвука в технике и медицине чаще всего служат пьезоэлектрики (кварц, титанат бария и др.), Так, например, в УЗ-зондах (рис. 4, а), применяемых в медицинских эхоскопах, пластинка из пьезоэлектрика (1)совершает упругие колебания под действием переменного электрического напряжения (обратный пьезоэффект), проводимого через разъем (2) от генератора. Частота напряжения обычно соответствует частоте собственных упругих колебаний пластинки (1) и лежит в УЗ-диапазоне. При этом энергия электрических колебаний частично переходит в энергию УЗ-волн, излучаемых зондом (в основном в направлении, перпендикулярном плоскости пластинки, см. рис. 4, зонд «а«). Аналогичные зонды используются в эхоскопах и для приема УЗ-волн (рис. 4, б). Приходящая УЗ-волна возбуждает упругие колебания пьезоэлектрической пластинки(1), которые вызывают слабые электрические колебания напряжения на концах пластинки (прямой пьезоэффект) и в разъеме (2). Режим работы УЗ-приборов, при котором УЗ-волны, излученные одним зондом («а«), принимаются другим («б«) после прохождения через исследуемый объект, называется режимом трансмиссии (Т-режим). Однако большее значение в технике и медицинской практике имеет режим эхолокации (Э-режим). В этом режиме волны, излученные УЗ-зондом (1) и отраженные от какой-либо границы сред (2) или включения (3), регистрируются другим (4) (рис. 5) или тем же (1) (рис. 6) УЗ-зондом, который при этом является сразу и источником, и приемником ультразвука. Для того чтобы разделить в последнем случае во времени прием и передачу УЗ-сигнала и избежать их наложения, а также для измерения времени распространения сигнала в объекте, эхоскопы работают в импульсном режиме (рис. 6). При этом в промежутках времени между импульсами излучения УЗ-зонд работает на прием. Э-режим используется для определения внутренней структуры непрозрачных для видимого света сред, местонахождения неоднородностей и включений среды, а также для оценки их формы и размеров.
Величину и форму объекта при этом оценивают по ширине и амплитуде отраженного сигнала, а также по их изменению при смещениях и поворотах УЗ-зонда. Описание прибора Медицинский акушерский эхоскоп ЭСМ-01 предназначен для УЗ-диагностики в акушерстве и гинекологии. Аналогичные по принципу действия приборы ЭХО-11, ЭХО-12 используются в нейрохирургии и травматологии для получения УЗ-энцефалограмм (эхоэнцефалограф). Передняя панель эхоскопа изображена на рис. 7. К разъему 3 подводятся импульсы переменного электрического напряжения, вырабатываемые генератором прибора. К этому разъему могут подключаться УЗ-зонды, рассчитанные на частоту 0,88 МГц, 1,76 МГц, 2,64 МГц. Через согласующий слой (вода, вазелиновое масло и т.п.) эти зонды прикладывают к поверхности исследуемого объекта (например, к коже пациента). В режиме «Э»тот же УЗ-зонд испускает импульсы УЗ-волн и (в промежутках) принимает УЗ-импульсы, отраженные от каких-то неоднородностей внутри объекта. Принятые УЗ-импульсы 2 усиливаются и вместе с зондирующим импульсом 1 и измерительными метками 3, 4 (рис. 8) наблюдаются на экране электронно-лучевой трубки прибора. Положение меток связано с измерительной шкалой прибора 2 (рис. 7). Перемещая их с помощью регулировок «НАЧАЛО ОТСЧЕТА» и «ИЗМЕРЕНИЕ» так, как показано на рис. 8, можно было бы измерить время между моментами испускания и приема УЗ-импульса, а затем по формуле (6) определить величину S расстояние от отразившей импульс неоднородности. Однако эхоскоп ЭСМ-10 предназначен в основном для исследования мягких тканей человека, в которых скорость распространения УЗ-волны примерно постоянна и равна 1540 м/сек (7) (см.
В случае использования эхоскопа для исследования сред, где скорость распространения УЗ-волн v и другая (), истинное расстояние S до неоднородности, отражающей импульс, должно быть рассчитано по формуле
непосредственно вытекающей из формул (6), (8). Формула (9) может быть использована и для нахождения скорости v распространения УЗ-волн в исследуемой среде, если истинное расстояние S измерить непосредственно (например, линейкой):
Порядок выполнения работы Упражнение 1. Ознакомление с устройством и методами регулировки эхоскопа. Задание выполняется с помощью преподавателя или лаборанта на тест-объекте из оргстекла (рис. 9). В режиме эхолокации «Э» с УЗ-зондом на частоту = 0,88 МГц, наложенным на поверхность тест-объекта (предварительно смазанную вазелиновым маслом), наблюдают на экране эхограмму тест-объекта, зарисовывают в тетрадь и объясняют ее вид. Студентам необходимо понять назначение регулировок «ЯРКОСТЬ», «ФОКУС», » «, » » (на задней панели прибора ли прибора), «Э Т», «МОЩНОСТЬ, «УСИЛЕНИЕ», «ОСЛАБЛЕНИЕ», «МАСШТАБ» (на передней панели) и освоить управление этими регулировками. Следует также освоить методику измерения расстояний по эхограмме с помощью регулировок «НАЧАЛО ОТСЧЕТА», «КОРЕКЦИЯ», «ИЗМЕРЕНИЕ» и измерительной шкалы прибора. Упражнение 2. Определение скорости распространения УЗ-волны в оргстекле. Выполняется на тест-объекте в режиме «Э» с УЗ-зондом на частоту = 0,88 МГц. 1. Получают эхограмму тест-объекта (см. упражнение 1). 2. Измеряют три раза по эхограмме (с помощью меток и шкалы) «расстояние» до задней поверхности тест-объекта, отражающей УЗ-волну, и находят среднее этого расстояния . 3. Линейкой определяют действительное значение этого расстояния S (длины тест-объекта), не равное (см. рис. 9). 4. По формуле (10) с учетом (7) рассчитывают скорость распространения УЗ-волны в оргстекле v. Отчет. Значение скорости v ультразвука в оргстекле с указанием единиц и погрешности измерения. Упражнение 3. Измерение коэффициента поглощения УЗ-волны в оргстекле. ;Внимание! Начальное положение регулировок «ОСЛАБЛЕНИЕ» и «ВАРУ» в этом упражнении 0. 1. Получают эхограмму тест-объекта (так же, как в упражнениях 1, 2). 2. Регулировками «МОЩНОСТЬ» и «УСИЛЕНИЕ» добиваются появления на эхограмме второго отраженного импульса 2 (рис. По клеточкам шкалы экрана замечают высоту второго отраженного сигнала . 3. Не изменяя положения регулировок «МОЩНОСТЬ» и «УСИЛЕНИЕ», ручкой «ОСЛАБЛЕНИЕ» добиваются выхода импульса 1 из насыщения и устанавливают его «высоту» (рис. 10, б). Отметим, что при этом импульс 2 может стать исчезающе мал. Положение ручки «ОСЛАБЛЕНИЕ» покажет разницу интенсивностей первого и второго отраженного импульсов в децибелах (дБ). 4. По формуле (1), полагая = 2 S (S длина тест-объекта), рассчитывают коэффициент поглощения УЗ-волны в оргстекле k (дБ/см). Действительно, разница в интенсивностях импульсов 1 и 2 в основном определяется лишь различием путей = 4 S – 2S = 2S, проходимых соответствующими волнами в оргстекле (так как на границе «оргстекло воздух» отражается приблизительно 99% энергии падающей УЗ-волны). 5. Не менее 5 раз повторяют упражнение и находят среднее значение коэффициента поглощения в оргстекле на частоте УЗ-волны = 0,88 МГц. 6. Заменяют УЗ-зонд на другой с удвоенной частотой = 1,76 МГц. По вышеописанной методике находят среднее значение коэффициента поглощения на частоте УЗ-волны =1,76 МГц. Отчет. 1. Значение коэффициента поглощения k ультразвука в оргстекле (на частотах = 0,88 МГц и = 1,76 МГц) с указанием единиц и погрешности измерения. 2. Вывод о качественной зависимости этого коэффициента от частоты ультразвука. Упражнение 4. Определение коэффициента отражения УЗ-волны на границе «оргстекло вода». 1. Помещают тест-объект на подставке в чашку с водой (рис. 11). 2. Получают эхограмму тест-объекта (аналогично упражнениям 1, 2, 3). Интенсивность J УЗ-импульса, отраженного от границы с водой, фиксируют достаточно большой ( 3 клеточки шкалы экрана) и запоминают. 3. Аккуратно вынимают тест-объект с подставкой из воды, тщательно обтирают тряпочкой мокрое основание и убеждаются, что интенсивность отраженного импульса при этом увеличилась (). 4. Учитывая, что при этом (п дБ = 0,1 п Б)
и, используя калькулятор, определяют отношение интенсивностей
отраженных импульсов, зарегистрированных эхоскопом. В формуле (12) величина
где и R коэффициент отражения УЗ-волны на границе «оргстекло воздух» и «оргстекло вола», соответственно*).  5. Считая коэффициент отражения на границе «оргстекло воздух» , из формулы (13) определяют значение коэффициента отражения на границе «оргстекло вода»
6. Повторяют измерения не менее пяти раз и находят среднее значение коэффициента R. 7. Рассчитывают теоретически значение коэффициента R, воспользовавшись формулой (3). Для этого вначале вычисляют акустические сопротивления оргстекла (z1) и воды (z2). Плотность стекла и воды принимают равными соответственно 1=1,2 г/см3, 2 = 1 г/см3, а значение скорости УЗ-волны в оргстекле (v1), берут из результатов упражнения 2; скорость УЗ-волны в воде v2 = 1540 м/с. 8. Сравнивают найденные экспериментально и теоретически значения коэффициента R. Вопросы для самоконтроля
Лабораторная работа № 6 Основы дозиметрии Цель работы: Знакомство с видами радиоактивного излучения и основами дозиметрического контроля. Краткая теория. Современное развитие наук вызвало необходимость систематизации и углубления опыта по исследованию влияния на биологические объекты (человеческий организм) различных видов излучения: радиоактивного, ультразвукового, высокочастотного, ультрафиолетового и т.д. В данной работе рассмотрим виды радиоактивного излучения, познакомимся с их основными свойствами, характерными для любого радиоактивного излучения и основами дозиметрического контроля. Основные свойства радиоактивного излучения Активность источника – мера радиоактивности, выраженная числом актов распада атомных ядер в единицу времени. Единица измерений: СИ: Беккерель [ Бк ] 1 Бк равен 1 ядерному превращению за 1 с или 0,027 нКи Практическая внесистемная единица: Кюри [ Ки ] 1 Ки = 3. Интенсивность излучения– энергия излучения, проходящая через единицу поперечного сечения за единицу времени. Единица измерений: СИ: Дж с-1 м-2 Практическая внесистемная единица: эВ с-1 см-2 1 электрон-вольт (эВ) = 1.6 10-19 Дж Проникающая способность – способность проникать как через прозрачные, так и через непрозрачные тела. Глубина проникновения зависит как от материала (через который проникает излучение), так и от вида и энергии (длины волны) излучения. Закон ослабления радиоактивного излучения Id= I0exp (- d), где I0 — начальная интенсивность излучения; Id — интенсивность излучения после прохождения через вещество толщиной d. - линейный коэффициент ослабления интенсивности, определяемый свойствами вещества, видом и энергией излучения. Ионизирующая способность – способность ионизировать вещество при прохождении через него. При этом происходит процесс, который в общем случае можно описать следующим уравнением: M + Eq = M+ + e, где M – атом или молекула, Eq – энергия кванта или частицы, M+ — положительно заряженный ион, e – электрон. Виды радиоактивного излучения — излучение – ионизирующее излучение, состоящее из альфа-частиц (ядер гелия 4He2+) с энергией 4-11 МэВ, испускаемых при ядерных превращениях. Кроме того, к данному виду излучения можно так же отнестипротонное (1p+1) излучение, а так же другие более тяжелые ядра отдачи, возникающие в результате ядерных превращений. — излучение обладает высокой ионизирующей и маленькой проникающей способностью. Пробег -частицы в воздухе составляет 3-11 см. Сложенный пополам лист обычной бумаги полностью поглощает эти частицы. Внешний покров тела человека также хорошо поглощает эти частицы. Опасно при попадании внутрь организма. — излучение – электронное и позитронное ионизирующее излучение с непрерывным энергетическим спектром (масса частиц 5.4 10-4 а.е.). Удельная ионизация значительно меньше, чем — частиц той же энергии. Проникающая способность — излучение значительно больше, чем — частиц и зависит от их энергии. Для частиц, обладающих энергией 3 МэВ, пробег в воздухе составляет около 3м. Одежда и кожный покров человеческого тела поглощает примерно 75% — частиц и только 20-25% проникает внутрь организма на глубину 2 мм. Наибольшую опасность представляет попадание этих частиц в глаза (внешняя поверхность глаза не имеет защитного слоя) и при попадании внутрь организма. - и рентгеновское–излучение – электромагнитное ионизирующее излучение с длиной волны менее 10-8 м. Удельная ионизация еще меньше, чем — частиц, но наибольшая проникающая способность по сравнению с — и — излучением. В воздухе распространяется на значительные расстояния практически без ослабления. Свинец, сталь, бетон и другие плотные материалы определенной толщины вызывают существенное ослабление. При прохождении — квантов через среду ионизация производится электронами, выбиваемыми из атомов — квантами.Особенно опасно при внешних облучениях. нейтронное – излучение – излучение, состоящее из нейтральных частиц(1n0). По своему воздействию на человеческий организм нейтроны делятся на две энергетические группы. Медленные нейтроны (с энергией 0-20 МэВ) вызывают активацию ядер окружающей среды. Ядро, поглотившее нейтрон, увеличивает на единицу свою массу, т. Быстрые нейтроны(с энергией более 20 МэВ) при столкновении с легкими атомами передают им часть своей кинетической энергии. Атомы начинают двигаться с такой скоростью, что теряют свои электроны, превращаясь в ионы, которые при движении в среде вызывают также ее ионизацию. Основные дозиметрические величины и единицы измерений Уровень радиации– мощность экспозиционной дозы на высоте 0.7-1 м над зараженной поверхностью. Экспозиционная доза – доза, полученная за время от начала заражения до времени полного распада радиоактивного вещества. Единица измерений: СИ: Кулон на килограмм [ Кл / кг ] Практическая внесистемная единица: Рентген [Р] 1Р = 2.6 10-4 Кл/кг 1Кл/кг = 3.9 103Р Мощность экспозиционной дозы (уровень радиации)– доза, получаемая объектом в единицу времени. Единица измерений: СИ: Кл/(кг с ) Практическая внесистемная единица: 1 Р/с = 3600 Р/ч = 86400 Р/сут 1 Р/ч = 24 Р/сут = 8760 Р/год Поглощенная доза излучения – энергия, переданная ионизирующим излучением единице массы облучаемого вещества: D = Eq/ m (m – масса облучаемого вещества). Единица измерений: СИ: Дж/кг или Гр (Грей) Практическая внесистемная единица: рад 1 рад = 0.01 Гр = 0.01 Дж/кг = 100 эрг/г. Эквивалентная доза – доза, введенная для оценки возможного ущерба здоровью человека от хронического воздействия ионизирующего излучения: H = kD D – поглощенная доза; k – коэффициет качества ионизирующего излучения. Единица измерений: СИ: Зиверт [Зв] Практическая внесистемная единица: бэр (биологический эквивалент рентгена) 1 бэр = 0. Коэффициент качества k – коэффициент для учета биологической эффективности разных видов ионизирующего излучения. k Рентгеновское и — излучение 1 — излучение (электроны и позитроны) 1 Быстрые нейтроны (с энергией 20 МэВ) 3 Медленные нейтроны (с энергией 0.1 – 10 МэВ) 10 Протоны с энергией — излучение с энергией Тяжелые ядра отдачи 20 Нормы радиационной безопасности Нормы радиационной безопасности (НРБ) устанавливают систему дозовых пределов и принципы их применения. НРБ основаны на следующих основных принципах радиационной безопасности:
В основу НРБ положены отечественный опыт обеспечения условий радиационной безопасности, результаты работ советских и зарубежных ученых, а также рекомендации Международной комиссии по радиологической защите. 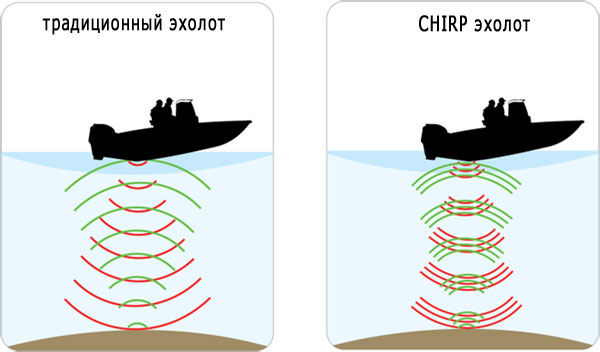 Устанавливаются следующие категории облучаемых лиц: категория А – лица, которые постоянно или временно работают непосредственно с источниками ионизирующих излучений; категория Б – лица, которые не работают непосредственно с источниками ионизирующих излучений, но по условиям проживания или размещения рабочих мест могут подвергаться воздействию радиоактивных веществ и других источников излучения; категория В – остальная часть населения страны. Кроме того устанавливаются так же три группы критических органов: I – все тело, гонады и красный костный мозг; II – мышцы, внутренние органы, глаза; III – кожный покров, костная ткань, кисти, предплечья, голени и стопы. Для каждой категории облучаемых лиц устанавливается основной дозовый предел. В качестве основных дозовых пределов в зависимости от группы критических органов для категории А устанавливается предельно допустимая доза за календарный год (ПДД), а для категории Б – предел дозы за календарный год (ПД). Предельно допустимая доза (ПДД) – это такое наибольшее значение индивидуальной эквивалентной дозы за календарный год, при котором равномерное облучение в течении 50 лет не может вызвать в состоянии здоровья неблагоприятных изменений, обнаруживаемых современными методами. Предел дозы (ПД) — это такое наибольшее среднее значение индивидуальной эквивалентной дозы за календарный год для лиц категории Б, при котором равномерное облучение в течении 70 лет не может вызвать в состоянии здоровья неблагоприятных изменений, обнаруживаемых современными методами. Основные дозовые пределы
*Примечание: Для женщин до 40 лет не более 1 бэр за 2 месяца в области таза.  Естественный фон в России: 4-20 мкР/ч или 35-175 мР/год Общая доза облучения всего организма для категории А не должна превышать (бэр): H = 5( N – 18 ) N – возраст, годы. Во всех случаях доза, накопленная за 30 лет, не должна превышать 60 бэр. Нормативы ПДД в военное время и аварийных ситуациях:
Лучевая болезнь начинается при однократном облучении мощностью 100 бэр. Тяжелая форма – 450 бэр. Приборы дозиметрического контроля Приборы, предназначенные для обнаружения и измерения радиоактивных излучений, называются дозиметрическими. Основными элементами дозиметрических приборов являются регистрирующие устройства (ионизационная трубка, счетчик), электрическая схема, источник питания, блок преобразования напряжения (Рис. Рис. 1 Принципиальная схема устройства дозиметрических приборов: 1 — регистрирующее устройство; 2 — усилитель ионизационного тока; 3 — измерительный прибор; 4 — преобразователь напряжения; 5 -источник питания Источником питания прибора служат батареи или сеть 5, напряжение которых повышается до необходимого значения с помощью специального преобразователя 4. Для измерений используются различные дозиметрические приборы ЛУЧ-А, ДП-5В, ДРГЗ-01(02,04), ДИП-0.05 и др. Порядок выполнения работы Задание 1. Измерение естественного фона в помещении для занятий. С помощью дозиметра “Мастер –1” измерить естественный фон в помещении для занятий. Дозиметр “Мастер – 1” предназначен для контроля радиационной обстановки на местности, в рабочих и жилых помещениях. Прибор измеряет мощность эквивалентной(экспозиционной) дозы в диапазоне от 0,10 до 9,99 МкЗв/ч (от 10 до 999 МкР/ч). Диапазон энергии излучений от 0,05 до 1,5 МэВ. Включить прибор. Для проведения измерений нажать кнопку ПУСК, при этом на цифровом табло должны появиться цифры 000, а справа от цифр мигающий знак “СЧ”. Через 36 с после нажатия кнопки ПУСК счет импульсов прекращается, о чем свидетельствует прекращение мигания знака “СЧ”. Установившееся на табло значение показывает мощность эквивалентной дозы в микрозивертах в час. Провести не менее трех измерений, найти среднее значение. Задание 2. Измерение естественного фона (уровня радиации) в помещении с источником ионизирующего излучения – рентгеновским дифрактометром. С помощью дозиметра “Мастер –1” повторить аналогичные измерения, указанные в задании 1. Сделать соответствующие выводы о радиационной безопасности в помещении. Задание 3. Проведение дозиметрического контроля защиты рентгеновского дифрактометра. Ознакомиться с устройством дозиметрического прибора ДРГЗ – 02. Прибор “ДРГЗ — 02” предназначен для контроля радиационной обстановки на местности, в рабочих и жилых помещениях. Прибор измеряет мощность экспозиционной дозы в диапазоне от 0,01 до 100 МкР/с . Тип детектора – сцинтилляционный. Диапазон энергии излучений от 0,015 до 1,25 МэВ. С помощью прибора ДРГЗ – 02 произвести замеры мощности экспозиционной дозы в непосредственной близости от рентгеновского пучка и за защитой рентгеновского дифрактометра в нескольких точках. Сделать выводы о соответствии защиты нормам по технике безопасности. Вопросы для самоконтроля
Лабораторная работа № 7 Цель работы. Целью работы является знакомство с получением и некоторыми свойствами рентгеновских лучей. Краткая теория. Три открытия возвестили новую эпоху в естествознании в конце девятнадцатого века: 1895 — открытие рентгеновских лучей; 1896 — открытие радиоактивности; 1897 — открытие электрона. Рентгеновские лучи были открыты немецким физиком Вильгельмом Конрадом Рентгеном. Рентгеновские лучи — это электромагнитное излучение с длиной волны от 10-12 до 10-8 м (от 0,01 до 100 А). В общей шкале электромагнитных излучений они находятся между гамма — и ультрафиолетовыми лучами. Рентгеновские лучи возникают при ударе быстро летящих электронов о вещество. Для получения рентгеновских лучей используют рентгеновские трубки (рис. 1). Трубка представляет собой закрытый сосуд с глубоким вакуумом и с впаянными электродами — катодом из вольфрамовой нити и анодом из массивного металла. Через катод K— трубки пропускают ток накала, что приводит к нагреванию катодной нити до высокой температуры и испусканию электронов с поверхности катода. Такой процесс называется термоэлектронной эмиссией. Если теперь между катодом K— и анодом А+ приложить достаточно высокое напряжение U, то электроны от катода будут двигаться к аноду (анодный ток), развивая кинетическую энергию EK = eU = mV2/ 2, где e, m, V — заряд, масса и скорость электрона, U — напряжение на электродах рентгеновской трубки. Существует два механизма образования рентгеновских лучей. Первый механизм состоит в том, что быстрые электроны тормозятся электрическими и магнитными полями атомов анода, при этом кинетическая энергия электронов переходит частично или полностью в энергию квантов электромагнитного излучения:
hc / — энергия одного рентгеновского кванта, h — постоянная Планка, c — скорость распространения электромагнитного излучения (скорость света), — длина волны. В случае когда кинетическая энергия электрона полностью переходит в энергию кванта излучения
образуется коротковолновая граница спектра (.  В результате ряда последовательных торможений электрона образуются рентгеновские кванты с различными длинами волн, т.е. с непрерывным спектром. Такое излучение называют тормозным или непрерывным (Рис. 2). Второй механизм связан со взаимодействием быстрых электронов с внутренними электронными уровнями атомов анода. При этом взаимодействии внешний электрон выбивает электрон с внутреннего уровня атома на более высокий уровень или совсем из атома (Рис. 3), атом переходит в возбужденное состояние. Мгновенно электрон с одного из верхних уровней атома переходит на свободный внутренний уровень, возникающая при этом избыточная энергия и удаляется из атома в виде электромагнитного излучения (рентгеновских квантов). Поскольку электронные уровни в атомах имеют строго определенные значения энергии, атом испускает рентгеновские лучи с набором строго определенных длин волн, характерных для каждого атома. Такое излучение называется характеристическим, или линейчатым (Рис. Некоторые основные свойства рентгеновских лучей. Как и другие виды электромагнитного излучения, рентгеновские лучи дают зеркальное отражение, преломление, распространяются в пространстве прямолинейно, не отклоняясь в электрических и магнитных полях. Одной из характеристик рентгеновских лучей является интенсивность. Интенсивностью называется энергия излучения, проходящая через единицу поперечного сечения за единицу времени. Она зависит как от энергии рентгеновских квантов, так и от их количества. Для того чтобы увеличить энергию кванта, необходимо повышать напряжение (тем самым, увеличивая скорость электронов) и повышать ток накала (т.е. повышать температуру катода), чтобы увеличить количество электронов, падающих на поверхность анода рентгеновской трубки. При этом выделяется большое количество теплоты и необходимо охлаждение. При прохождении через вещество рентгеновские лучи вызывают его ионизацию: 1 2 3 4 5 6 | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 Эти колебания усиливаются в усилителе (3) и могут наблюдаться, например, на экране осциллографа (4).
Эти колебания усиливаются в усилителе (3) и могут наблюдаться, например, на экране осциллографа (4). Для этого, измеряя время между излучением и приемом отраженного сигнала и зная среднюю скорость распространения УЗ-волны в изучаемой среде v, находят расстояние S до отразившего сигнал объекта по формуле
Для этого, измеряя время между излучением и приемом отраженного сигнала и зная среднюю скорость распространения УЗ-волны в изучаемой среде v, находят расстояние S до отразившего сигнал объекта по формуле
 на шкале прибора рис. 7). Поэтому для удобства измерений во время клинического обследования измерительная шкала в режиме «Э» непосредственно показывает расстояние (в мм) от УЗ-зонда до отразившей импульс неоднородности:
на шкале прибора рис. 7). Поэтому для удобства измерений во время клинического обследования измерительная шкала в режиме «Э» непосредственно показывает расстояние (в мм) от УЗ-зонда до отразившей импульс неоднородности:
 10, а), соответствующего УЗ-волне, дважды прошедшей тест-объект в прямом и обратном направлениях; при этом первый отраженный импульс 1 на эхограмме может находиться «в насыщении», выходя за пределы шкалы экрана (см. рис. 10, а).
10, а), соответствующего УЗ-волне, дважды прошедшей тест-объект в прямом и обратном направлениях; при этом первый отраженный импульс 1 на эхограмме может находиться «в насыщении», выходя за пределы шкалы экрана (см. рис. 10, а).
 Регулировкой «ОСЛАБЛЕНИЕ» добиваются выравнивания ее с прежним значением J. Показание п шкалы «ОСЛАБЛЕНИЕ» будет при этом соответствовать разнице интенсивностей (дБ).
Регулировкой «ОСЛАБЛЕНИЕ» добиваются выравнивания ее с прежним значением J. Показание п шкалы «ОСЛАБЛЕНИЕ» будет при этом соответствовать разнице интенсивностей (дБ).

 7 1010 ядерных превращений за 1 секунду.
7 1010 ядерных превращений за 1 секунду.

 е. становится новым изотопом элемента, который, как правило, не устойчив. Его распад сопровождается испусканием заряженных частиц и иногда — квантами, которые опять-таки вызывают ионизацию.
е. становится новым изотопом элемента, который, как правило, не устойчив. Его распад сопровождается испусканием заряженных частиц и иногда — квантами, которые опять-таки вызывают ионизацию.
 01 Дж/кг = 0.01 Зв
01 Дж/кг = 0.01 Зв
 1). Регистрирующее устройство: ионизационная трубка или газоразрядный счетчик 1 представляют собой заполненный воздухом или инертным газом замкнутый объем, внутри которого находятся два электрода. К электродам приложено напряжение от источника постоянного тока. При отсутствии радиоактивного излучения в цепи регистрирующего устройства тока не будет, поскольку воздух и инертный газ являются изоляторами. При воздействии радиоактивного излучения на регистрирующее устройство молекулы воздуха (или инертного газа) в нем ионизируются. Положительно заряженные частицы перемещаются к катоду (-), а отрицательные – к аноду (+). В цепи появляется ионизационный ток, для измерения которого служит микроамперметр 3.
1). Регистрирующее устройство: ионизационная трубка или газоразрядный счетчик 1 представляют собой заполненный воздухом или инертным газом замкнутый объем, внутри которого находятся два электрода. К электродам приложено напряжение от источника постоянного тока. При отсутствии радиоактивного излучения в цепи регистрирующего устройства тока не будет, поскольку воздух и инертный газ являются изоляторами. При воздействии радиоактивного излучения на регистрирующее устройство молекулы воздуха (или инертного газа) в нем ионизируются. Положительно заряженные частицы перемещаются к катоду (-), а отрицательные – к аноду (+). В цепи появляется ионизационный ток, для измерения которого служит микроамперметр 3.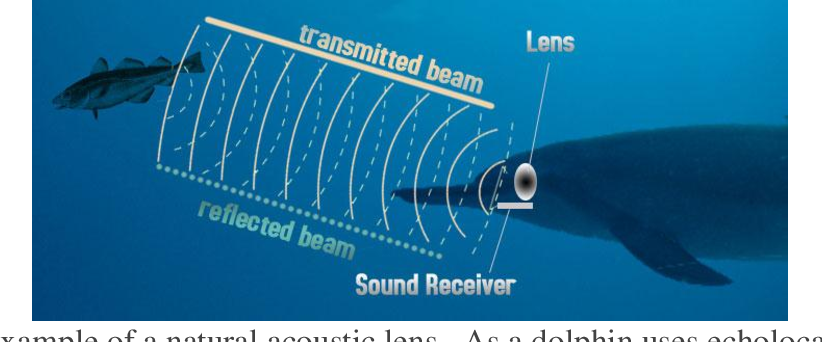
 Сопоставить полученное значение с соответствующими значениями Норм радиационной безопасности. Сделать соответствующие выводы о радиационной безопасности в помещении.
Сопоставить полученное значение с соответствующими значениями Норм радиационной безопасности. Сделать соответствующие выводы о радиационной безопасности в помещении.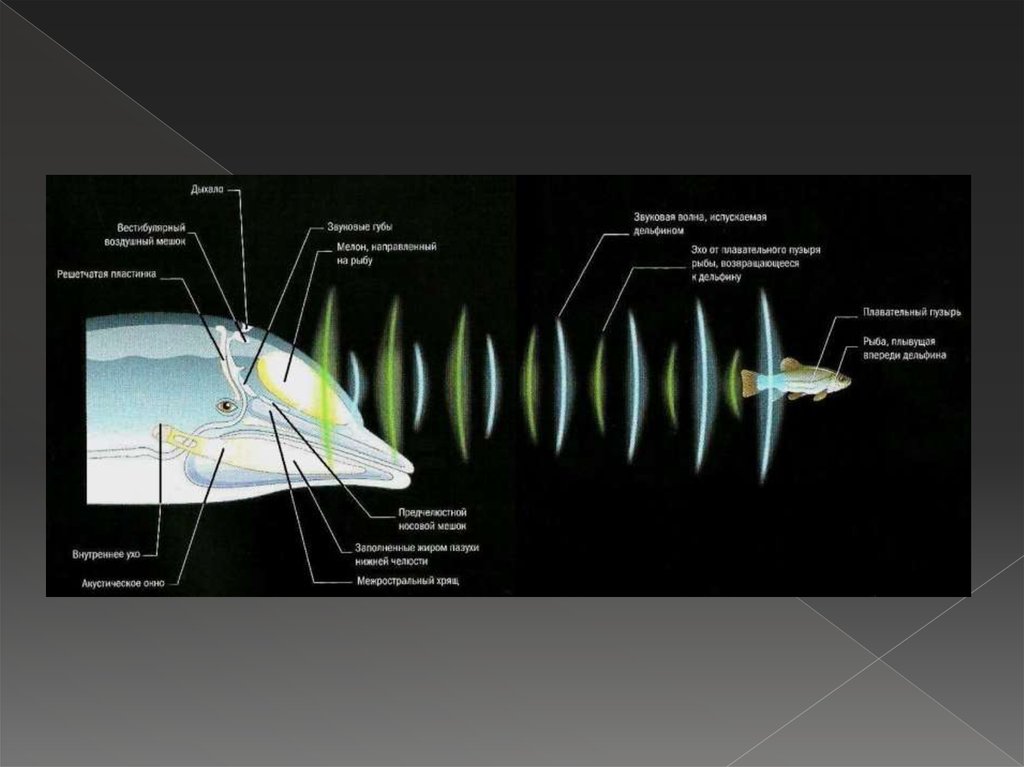

 В результате взаимодействия быстрых электронов с материалами анода образуются рентгеновские лучи.
В результате взаимодействия быстрых электронов с материалами анода образуются рентгеновские лучи. 2).
2).Группа компаний ИНФРА-М
Текст произведения
(PDF): Читать
Скачать
Введение Освоение человеком Мирового океана трудно представить без развития таких наук как гидрогеология, гидробиология, гидрофизика и других.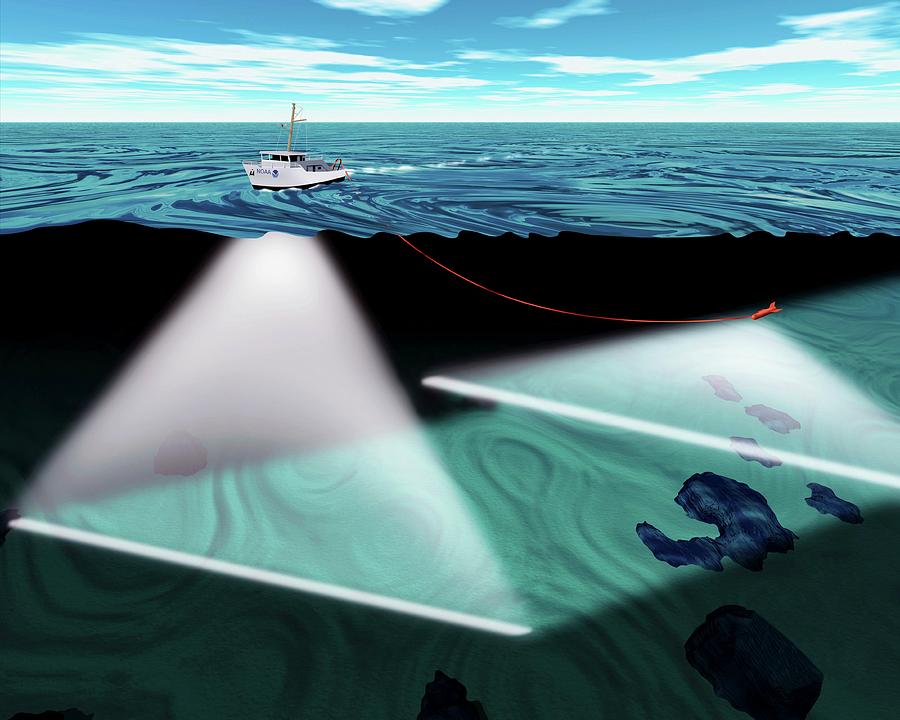 Особое место занимает гидроакустика, которая изучает особенности распространения, отражения, затухания звуковых волн в реальной водной среде для целей освещения как надводной, так и подводной обстановки. При этом решаются задачи активной и пассивной локации, классификации и распознавания, связи, поиска затонувших объектов и т. д. При проектировании гидроакустических средств конструкторы стремятся учитывать опыт живой природы и, в частности, локационную систему дельфинов. Изучение особенностей локационной системы дельфинов требует решения широкого круга задач, а именно, механизмов формирования и структур излучаемых сигналов, их адаптацию к изменяющимся свойствам среды и помехо-сигнальной обстановки, способность к восприятию большого разнообразия сигналов и распознаванию предметов, имеющих различные свойства и структуру. В 1947 году А. Мак-Брайд впервые сообщает о наличии эхолокации у дельфинов. Экспериментальные доказательства эхолокационных способностей китообразных были получены позднее.
Особое место занимает гидроакустика, которая изучает особенности распространения, отражения, затухания звуковых волн в реальной водной среде для целей освещения как надводной, так и подводной обстановки. При этом решаются задачи активной и пассивной локации, классификации и распознавания, связи, поиска затонувших объектов и т. д. При проектировании гидроакустических средств конструкторы стремятся учитывать опыт живой природы и, в частности, локационную систему дельфинов. Изучение особенностей локационной системы дельфинов требует решения широкого круга задач, а именно, механизмов формирования и структур излучаемых сигналов, их адаптацию к изменяющимся свойствам среды и помехо-сигнальной обстановки, способность к восприятию большого разнообразия сигналов и распознаванию предметов, имеющих различные свойства и структуру. В 1947 году А. Мак-Брайд впервые сообщает о наличии эхолокации у дельфинов. Экспериментальные доказательства эхолокационных способностей китообразных были получены позднее.
 Сама эхолокация возникает, когда к аппарату восприятия ультразвука добавляется ультразвуковая излучающая система с запуском зондирующих дискретных импульсов. Локационное зондирование среды дельфины осуществляют, излучая короткие широкополосные импульсные сигналы, представляющие собой один-полтора периода волны сжатия-растяжения длительностью 10-100 мкс в широком диапазоне частот. В 1962-1965 годах в науке сложилась ситуация, когда учёные разных стран обратили внимание на возможности прикладного использования принципов и механизмов работы сонара китообразных. На основании Постановления Совета Министров СССР в 1965 г. в районе г. Севастополя был создан Государственный Океанариум как научно-техническая база ВМФ. На базе Океанариума работали более 50 организаций: научно-исследовательских институтов, высших учебных заведений, конструкторских бюро. В отделе биогидроакустики исследовались локационные возможности дельфинов с целью совершенствования гидроакустических систем связи. Большой вклад в изучение этой проблемы внесли Институт эволюционной физиологии и биохимии им.
Сама эхолокация возникает, когда к аппарату восприятия ультразвука добавляется ультразвуковая излучающая система с запуском зондирующих дискретных импульсов. Локационное зондирование среды дельфины осуществляют, излучая короткие широкополосные импульсные сигналы, представляющие собой один-полтора периода волны сжатия-растяжения длительностью 10-100 мкс в широком диапазоне частот. В 1962-1965 годах в науке сложилась ситуация, когда учёные разных стран обратили внимание на возможности прикладного использования принципов и механизмов работы сонара китообразных. На основании Постановления Совета Министров СССР в 1965 г. в районе г. Севастополя был создан Государственный Океанариум как научно-техническая база ВМФ. На базе Океанариума работали более 50 организаций: научно-исследовательских институтов, высших учебных заведений, конструкторских бюро. В отделе биогидроакустики исследовались локационные возможности дельфинов с целью совершенствования гидроакустических систем связи. Большой вклад в изучение этой проблемы внесли Институт эволюционной физиологии и биохимии им.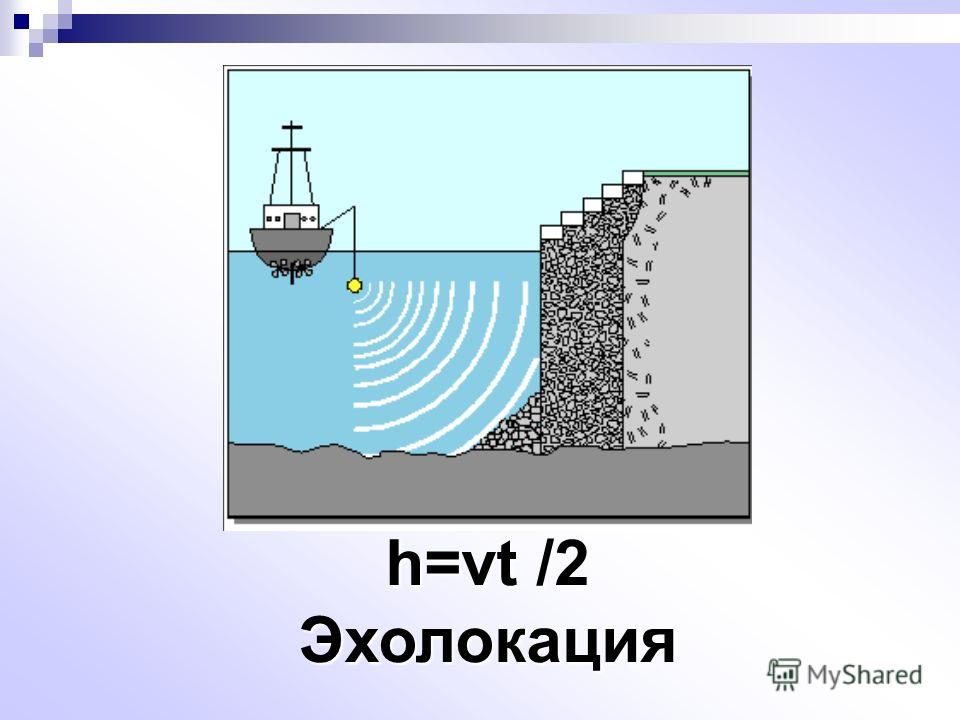 И.М. Сеченова АН СССР, Институт эволюционной морфологии и экологии им. А.Н. Северцова АН СССР, Акустический институт им. Н.Н. Андреева АН СССР, Ленинградский государственный университет, Ленинградский институт авиационного приборостроения и другие организации. Гидролокатор дельфина Анатомические и акустические исследования показали, что издаваемые дельфинами звуки генерируются в области лобно-жирового выступа (мелона) и верхней челюсти. В продуцировании звуков участвуют пары носовых мускульных пробок, частично закрывающих носовой проход. Пары воздушных мешков, связанных с этими носовыми пробками, являются рефлекторами для формирования направленности продуцируемого звука и резервуарами для воздуха, используемого для генерации звука. Первая пара воздушных мешков — дорзальные — отделяется сразу же от носового прохода, который идёт от наружного дыхательного отверстия-клапана (дыхала). Вторая пара мешков — премаксилярные — отходит от средней части носового прохода, третья — назофронтальные — отделяется от носового прохода в месте его деления на два костных канала.
И.М. Сеченова АН СССР, Институт эволюционной морфологии и экологии им. А.Н. Северцова АН СССР, Акустический институт им. Н.Н. Андреева АН СССР, Ленинградский государственный университет, Ленинградский институт авиационного приборостроения и другие организации. Гидролокатор дельфина Анатомические и акустические исследования показали, что издаваемые дельфинами звуки генерируются в области лобно-жирового выступа (мелона) и верхней челюсти. В продуцировании звуков участвуют пары носовых мускульных пробок, частично закрывающих носовой проход. Пары воздушных мешков, связанных с этими носовыми пробками, являются рефлекторами для формирования направленности продуцируемого звука и резервуарами для воздуха, используемого для генерации звука. Первая пара воздушных мешков — дорзальные — отделяется сразу же от носового прохода, который идёт от наружного дыхательного отверстия-клапана (дыхала). Вторая пара мешков — премаксилярные — отходит от средней части носового прохода, третья — назофронтальные — отделяется от носового прохода в месте его деления на два костных канала. Характерной чертой строения воздухоносных путей дельфинов является их деление на ряд участков, в которых давление воздуха различно: 1. носовой проход с системой воздушных мешков. 2. полость костных носовых проходов с небольшой хоанной полостью, отделённая от первого участка клапаном, который располагается между премаксилярным и назофронтальным мешками. 3. полость гортани, трахеи и крупных бронхов вплоть до системы сфинктеров бронхов. Хотя до последнего времени механизм генерации звуков остаётся недостаточно ясным, решение этого вопроса, тем не менее, тесно связано с временны́м и произвольным разделением воздушных потоков дыхательного тракта, разделённых на ряд участков. Перепад давления воздуха после акта вдох-выдох между первым, вторым и третьим участками будет реально иметь место, что создает предпосылки для формирования нужного давления, изменение которого дает возможность формирования большого разнообразия параметров звуков. Все предполагаемые в настоящее время схемы генерации звуков представляют собой достаточно сложный механизм с точной регулировкой всех фаз его деятельности.
Характерной чертой строения воздухоносных путей дельфинов является их деление на ряд участков, в которых давление воздуха различно: 1. носовой проход с системой воздушных мешков. 2. полость костных носовых проходов с небольшой хоанной полостью, отделённая от первого участка клапаном, который располагается между премаксилярным и назофронтальным мешками. 3. полость гортани, трахеи и крупных бронхов вплоть до системы сфинктеров бронхов. Хотя до последнего времени механизм генерации звуков остаётся недостаточно ясным, решение этого вопроса, тем не менее, тесно связано с временны́м и произвольным разделением воздушных потоков дыхательного тракта, разделённых на ряд участков. Перепад давления воздуха после акта вдох-выдох между первым, вторым и третьим участками будет реально иметь место, что создает предпосылки для формирования нужного давления, изменение которого дает возможность формирования большого разнообразия параметров звуков. Все предполагаемые в настоящее время схемы генерации звуков представляют собой достаточно сложный механизм с точной регулировкой всех фаз его деятельности. На рис.1 приведена схема гидролокатора дельфина. Сигнал формируется в мелоне (акустической линзе) — он фокусирует звуковые колебания и согласовывает соответствующие характеристики антенны и воды. Анатомически лобно-жировой выступ расположен перед назально-фронтальными воздушными мешками. Звук, генерируемый парой пробок, передаётся в мелон и после формирования в нем, передаётся в воду. В лаборатории Института физиологии им. А.А. Ухтомского при СПбГУ были измерены характеристики этой линзы. Было показано, что её параметры плавно меняются от центра к периферии, а на процесс формирования акустического поля влияют также и температурные градиенты и предположено, что воздушные мешки, помимо генерации ультразвуковых колебаний, могут изменять геометрические размеры мелона, варьируя при этом шириной поля излучения. Изучением и моделированием принципа действия сонара дельфина занимались многие исследователи. Его принципиальная схема состоит из генератора коротких импульсов (пневмопушки), рефлектора и рефрактора.
На рис.1 приведена схема гидролокатора дельфина. Сигнал формируется в мелоне (акустической линзе) — он фокусирует звуковые колебания и согласовывает соответствующие характеристики антенны и воды. Анатомически лобно-жировой выступ расположен перед назально-фронтальными воздушными мешками. Звук, генерируемый парой пробок, передаётся в мелон и после формирования в нем, передаётся в воду. В лаборатории Института физиологии им. А.А. Ухтомского при СПбГУ были измерены характеристики этой линзы. Было показано, что её параметры плавно меняются от центра к периферии, а на процесс формирования акустического поля влияют также и температурные градиенты и предположено, что воздушные мешки, помимо генерации ультразвуковых колебаний, могут изменять геометрические размеры мелона, варьируя при этом шириной поля излучения. Изучением и моделированием принципа действия сонара дельфина занимались многие исследователи. Его принципиальная схема состоит из генератора коротких импульсов (пневмопушки), рефлектора и рефрактора. Принцип действия акустической пушки был смоделирован в Акустическом институте [1]. В других исследованиях были предложены различные модели формирования акустического поля локатора — от моделей логарифмических антенн до математических с суперпозицией излучённых и отражённых импульсов. В настоящее время отсутствует гипотеза, которая бы непротиворечиво объединяла и объясняла опытные факты по вопросу генерации и формирования эхолокационного сигнала. Однако увеличение числа исследований по данной проблеме позволяет надеяться на появление обобщающей гипотезы в ближайшее время. Эхолокационные сигналы дельфина Зондирующими сигналами, по установившейся терминологии, называется последовательность импульсов, излучаемых дельфинами для решения определённой эхолокационной задачи, а зондирующим импульсом — одиночный импульс из последовательности импульсов, составляющих эхолокационный сигнал. Импульс имеет сложную структуру и состоит из ряда компонент. Зондирующим является только импульс, зарегистрированный в дальнем поле, т.
Принцип действия акустической пушки был смоделирован в Акустическом институте [1]. В других исследованиях были предложены различные модели формирования акустического поля локатора — от моделей логарифмических антенн до математических с суперпозицией излучённых и отражённых импульсов. В настоящее время отсутствует гипотеза, которая бы непротиворечиво объединяла и объясняла опытные факты по вопросу генерации и формирования эхолокационного сигнала. Однако увеличение числа исследований по данной проблеме позволяет надеяться на появление обобщающей гипотезы в ближайшее время. Эхолокационные сигналы дельфина Зондирующими сигналами, по установившейся терминологии, называется последовательность импульсов, излучаемых дельфинами для решения определённой эхолокационной задачи, а зондирующим импульсом — одиночный импульс из последовательности импульсов, составляющих эхолокационный сигнал. Импульс имеет сложную структуру и состоит из ряда компонент. Зондирующим является только импульс, зарегистрированный в дальнем поле, т. е. на расстояниях, для которых убывание амплитуды импульса происходит по сферическому закону. Длительность зондирующего сигнала может существенно меняться в зависимости от дальности объекта локации, его отражательной способности и других факторов в пределах от долей секунды, когда сигнал состоит из 2-3 импульсов, до минуты и более, когда излучается множество импульсов, составляющих группы импульсов — пачки. Дельфин излучает каждый последующий импульс после принятия эха от предыдущего, т. е. интервал между импульсами Т должен удовлетворять условию: , где — расстояние до объекта, с — скорость звука в воде. Животное может увеличивать частоту следования зондирующих импульсов по мере приближения к объекту, но делает это не всегда. При локации, брошенной в воду рыбы, наблюдается закономерное увеличение частоты следования импульсов, а при решении задач обнаружения и различения закономерного увеличения частоты следования не наблюдается вплоть до момента принятия решения. Эхолокационные сигналы подробнее всего изучены на афалинах.
е. на расстояниях, для которых убывание амплитуды импульса происходит по сферическому закону. Длительность зондирующего сигнала может существенно меняться в зависимости от дальности объекта локации, его отражательной способности и других факторов в пределах от долей секунды, когда сигнал состоит из 2-3 импульсов, до минуты и более, когда излучается множество импульсов, составляющих группы импульсов — пачки. Дельфин излучает каждый последующий импульс после принятия эха от предыдущего, т. е. интервал между импульсами Т должен удовлетворять условию: , где — расстояние до объекта, с — скорость звука в воде. Животное может увеличивать частоту следования зондирующих импульсов по мере приближения к объекту, но делает это не всегда. При локации, брошенной в воду рыбы, наблюдается закономерное увеличение частоты следования импульсов, а при решении задач обнаружения и различения закономерного увеличения частоты следования не наблюдается вплоть до момента принятия решения. Эхолокационные сигналы подробнее всего изучены на афалинах. Получены основные спектральные характеристики эхолокационных импульсов: положение максимума спектра, ширина полосы частот, пространственно-временна́я структура, оценены разрешающие способности эхолокационного аппарата. Дельфин излучает сигналы и воспринимает их в огромной полосе частот — от 20 до 200000 Гц (для сравнения: возможности человеческого слуха — 20-20000 Гц). Появление в 70-х годах ХХ века аппаратуры, записывающей их сигналы без искажений, показало, что дельфины используют широкополосные сигналы, структура которых значительно сложнее, чем узкополосных. Математические модели широкополосных сигналов требуют использования более изощрённой математики, а именно, методов функционального анализа, расширения понятия акустического сигнала и введения представлений сигнала, согласованных с преобразованиями носителя сигнала. Большой вклад в этом направлении был сделан В.А. Сапрыкиным и его научной школой [2], теоретической базой которой является теоретико-групповой подход в теории сигналов, позволяющий создать адекватные модели сложных широкополосных сигналов, преобразованных средой и кинематикой движущихся объектов локации.
Получены основные спектральные характеристики эхолокационных импульсов: положение максимума спектра, ширина полосы частот, пространственно-временна́я структура, оценены разрешающие способности эхолокационного аппарата. Дельфин излучает сигналы и воспринимает их в огромной полосе частот — от 20 до 200000 Гц (для сравнения: возможности человеческого слуха — 20-20000 Гц). Появление в 70-х годах ХХ века аппаратуры, записывающей их сигналы без искажений, показало, что дельфины используют широкополосные сигналы, структура которых значительно сложнее, чем узкополосных. Математические модели широкополосных сигналов требуют использования более изощрённой математики, а именно, методов функционального анализа, расширения понятия акустического сигнала и введения представлений сигнала, согласованных с преобразованиями носителя сигнала. Большой вклад в этом направлении был сделан В.А. Сапрыкиным и его научной школой [2], теоретической базой которой является теоретико-групповой подход в теории сигналов, позволяющий создать адекватные модели сложных широкополосных сигналов, преобразованных средой и кинематикой движущихся объектов локации. Для широкополосных сигналов понятие фаза, амплитуда, частота являются времязависимыми, т. е. являются функциями, а не числами, как у тональных сигналов. Эффект Доплера рассматривается не просто как сдвиг по частоте, а как аффинное преобразование времени, а для быстродвижущихся объектов как дробно-линейное. Сложные широкополосные сигналы обладают хорошими разрешающими способностями, как по частоте, так и по времени. Используемые дельфином сигналы являются модулированными, причём модуляция осуществляется и по амплитуде, и по фазе, и по частоте. С развитием радиотехнических и гидроакустических систем было замечено: чем шире частотная полоса сигнала, тем выше помехоустойчивость связи. При такой модуляции частота меняется во времени. В сигнале, который излучает дельфин, присутствуют все частоты одновременно, т. е. сигнал широкополосный и сосредоточен во времени. При формировании акустического импульса в пространстве выделяется период его нарастания (увеличения по амплитуде), потом следует установившийся колебательный процесс (несущая частота не меняется), а в дальнейшем сигнал убывает.
Для широкополосных сигналов понятие фаза, амплитуда, частота являются времязависимыми, т. е. являются функциями, а не числами, как у тональных сигналов. Эффект Доплера рассматривается не просто как сдвиг по частоте, а как аффинное преобразование времени, а для быстродвижущихся объектов как дробно-линейное. Сложные широкополосные сигналы обладают хорошими разрешающими способностями, как по частоте, так и по времени. Используемые дельфином сигналы являются модулированными, причём модуляция осуществляется и по амплитуде, и по фазе, и по частоте. С развитием радиотехнических и гидроакустических систем было замечено: чем шире частотная полоса сигнала, тем выше помехоустойчивость связи. При такой модуляции частота меняется во времени. В сигнале, который излучает дельфин, присутствуют все частоты одновременно, т. е. сигнал широкополосный и сосредоточен во времени. При формировании акустического импульса в пространстве выделяется период его нарастания (увеличения по амплитуде), потом следует установившийся колебательный процесс (несущая частота не меняется), а в дальнейшем сигнал убывает. Чем уже полоса пропускания передающей антенны, тем длиннее периоды нарастания и убывания, тем длиннее и устойчивее колебательный процесс, характеризующийся несущей частотой. Такого установившегося процесса в импульсах дельфина просто нет. Можно сказать, что он использует сигналы с нулевой несущей. Система тем устойчивее к разного рода помехам, чем больше модуляций она использует. А дельфины применяют такое их количество, что сосчитать и исследовать пока никому не удалось. Полученные в опытах сигналы животных напоминали одиночную волну с полуволной сжатия и разряжения. Спектральная же характеристика импульса по акустической оси не имеет определённого максимума, но зависит от азимута. Первые экспериментальные данные показали: пространственная характеристика звукового поля дельфинов близка к предсказанной для широкополосных сигналов — отсутствуют боковые составляющие поля излучения, что уменьшает неоднозначность определения цели по угловым координатам. При усложнении задачи или ухудшении соотношения сигнал/помеха животные резко усиливают сигналы.
Чем уже полоса пропускания передающей антенны, тем длиннее периоды нарастания и убывания, тем длиннее и устойчивее колебательный процесс, характеризующийся несущей частотой. Такого установившегося процесса в импульсах дельфина просто нет. Можно сказать, что он использует сигналы с нулевой несущей. Система тем устойчивее к разного рода помехам, чем больше модуляций она использует. А дельфины применяют такое их количество, что сосчитать и исследовать пока никому не удалось. Полученные в опытах сигналы животных напоминали одиночную волну с полуволной сжатия и разряжения. Спектральная же характеристика импульса по акустической оси не имеет определённого максимума, но зависит от азимута. Первые экспериментальные данные показали: пространственная характеристика звукового поля дельфинов близка к предсказанной для широкополосных сигналов — отсутствуют боковые составляющие поля излучения, что уменьшает неоднозначность определения цели по угловым координатам. При усложнении задачи или ухудшении соотношения сигнал/помеха животные резко усиливают сигналы. С точки зрения теории сигналов они используют при этом интегральновременно́е кодирование. Возможности гидролокатора дельфина Использование гидролокатором дельфина широкополосных сигналов открывает перед ним большие возможности акустического обзора как при активной [1], так и при пассивной локации [3-9]. Как показали многочисленные исследования отечественных и иностранных авторов, эхолокатор дельфина является весьма эффективным инструментом активного анализа внешней среды. Он позволяет животному решать разнообразные задачи: обнаруживать подводные объекты на расстоянии до 600 м за счёт перехода от моноимпульсного к мультиимпульсному режиму локации, обнаруживать подводные объекты, размер которых может быть в несколько раз меньше длины волны, соответствующей максимуму спектра зондирующего сигнала, различать и узнавать объекты, отличающиеся по размеру всего на 2%, дифференцировать цели по материалу, форме, взаимному расположению элементов сложной мишени (при различиях в местоположениях, соответствующих задержкам в 2-5 мкс), пеленговать звучащие источники с ошибкой до одного градуса даже при наличии помех, превосходящих сигнал на четыре порядка по мощности и расположенные на угловом расстоянии в один градус.
С точки зрения теории сигналов они используют при этом интегральновременно́е кодирование. Возможности гидролокатора дельфина Использование гидролокатором дельфина широкополосных сигналов открывает перед ним большие возможности акустического обзора как при активной [1], так и при пассивной локации [3-9]. Как показали многочисленные исследования отечественных и иностранных авторов, эхолокатор дельфина является весьма эффективным инструментом активного анализа внешней среды. Он позволяет животному решать разнообразные задачи: обнаруживать подводные объекты на расстоянии до 600 м за счёт перехода от моноимпульсного к мультиимпульсному режиму локации, обнаруживать подводные объекты, размер которых может быть в несколько раз меньше длины волны, соответствующей максимуму спектра зондирующего сигнала, различать и узнавать объекты, отличающиеся по размеру всего на 2%, дифференцировать цели по материалу, форме, взаимному расположению элементов сложной мишени (при различиях в местоположениях, соответствующих задержкам в 2-5 мкс), пеленговать звучащие источники с ошибкой до одного градуса даже при наличии помех, превосходящих сигнал на четыре порядка по мощности и расположенные на угловом расстоянии в один градус. Столь высокая эффективность работы локационной системы дельфина достигается за счёт использования адаптивных механизмов как излучения, так и приёма звука: целесообразное изменение мощности излучения, спектра локационного импульса, частоты следования импульсов и траектории движения. Полученные экспериментальные данные свидетельствуют о том, что локатор дельфина может служить полезным живым прототипом технических сенсорных систем, которые потребуются человеку при широком освоении Мирового океана. До настоящего времени целая группа важных вопросов исследования и моделирования эхолокатора дельфина осталась малоисследованной — детальное изучение ближнего эхолокационного поля, механизмы проведения звука к улитке, нейрофизиологические механизмы звукового анализа и ряд других. И, тем не менее, имеющийся экспериментальный материал позволяет выделить ряд направлений исследований, представляющих наибольший бионический интерес: исследование механизмов эхолокационного различения объектов, исследование адаптивных особенностей эхолокационного анализа, решение вопроса о подстройке тонкой структуры излучаемого сигнала, возможности адаптивных изменений диаграммы направленности по излучению, механизмы излучения зондирующих импульсов, позволяющих получать короткие по времени, мощные и направленные в обеих плоскостях сигналы, механизмы слухового анализа эхолокационных импульсов.
Столь высокая эффективность работы локационной системы дельфина достигается за счёт использования адаптивных механизмов как излучения, так и приёма звука: целесообразное изменение мощности излучения, спектра локационного импульса, частоты следования импульсов и траектории движения. Полученные экспериментальные данные свидетельствуют о том, что локатор дельфина может служить полезным живым прототипом технических сенсорных систем, которые потребуются человеку при широком освоении Мирового океана. До настоящего времени целая группа важных вопросов исследования и моделирования эхолокатора дельфина осталась малоисследованной — детальное изучение ближнего эхолокационного поля, механизмы проведения звука к улитке, нейрофизиологические механизмы звукового анализа и ряд других. И, тем не менее, имеющийся экспериментальный материал позволяет выделить ряд направлений исследований, представляющих наибольший бионический интерес: исследование механизмов эхолокационного различения объектов, исследование адаптивных особенностей эхолокационного анализа, решение вопроса о подстройке тонкой структуры излучаемого сигнала, возможности адаптивных изменений диаграммы направленности по излучению, механизмы излучения зондирующих импульсов, позволяющих получать короткие по времени, мощные и направленные в обеих плоскостях сигналы, механизмы слухового анализа эхолокационных импульсов. Настоящая работа в её экспериментальной части посвящена исследованию первого из перечисленных выше направлений, а именно механизмов эхолокационного различения объектов. После обнаружения дельфином объекта локации перед животным стоит задача распознавания его основных параметров, а именно формы, размера, материала. Хотя к настоящему времени известно, что ряд видов дельфинов [10-17] обладает способностью к тонкому различению параметров и свойств предметов локации, однако наиболее изучены разрешающие возможности афалины [14,15]. Тщательные экспериментальные исследования показали, что признаками различения мишеней могут быть 1) величина интенсивности отраженного сигнала, 2) изменение фазовых составляющих компонент сигнала, 3) разница в характеристиках направленности излучения и приема, 4) соотношение интервалов времени между первичным и вторичным эхо, 5) особенности спектральной структуры сигнала, 6) положение максимума в спектре сигнала и средняя величина периода осцилляций в спектре. В 1975 г.
Настоящая работа в её экспериментальной части посвящена исследованию первого из перечисленных выше направлений, а именно механизмов эхолокационного различения объектов. После обнаружения дельфином объекта локации перед животным стоит задача распознавания его основных параметров, а именно формы, размера, материала. Хотя к настоящему времени известно, что ряд видов дельфинов [10-17] обладает способностью к тонкому различению параметров и свойств предметов локации, однако наиболее изучены разрешающие возможности афалины [14,15]. Тщательные экспериментальные исследования показали, что признаками различения мишеней могут быть 1) величина интенсивности отраженного сигнала, 2) изменение фазовых составляющих компонент сигнала, 3) разница в характеристиках направленности излучения и приема, 4) соотношение интервалов времени между первичным и вторичным эхо, 5) особенности спектральной структуры сигнала, 6) положение максимума в спектре сигнала и средняя величина периода осцилляций в спектре. В 1975 г.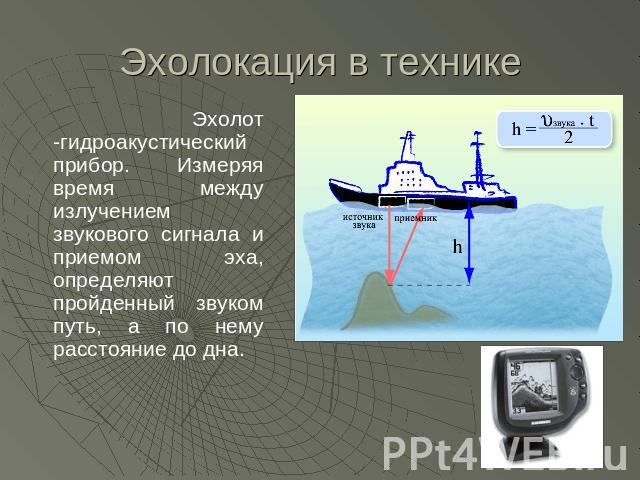 Н.А.Дубровским была сформулирована гипотеза [14] о механизмах, лежащих в основе различения дельфинами объектов локации, отличающихся между собой по размеру и материалу. Суть гипотезы заключается в том, что различение объектов возможно в том случае, когда в слуховой системе животного происходит анализ спектра эха, в котором содержится информация о собственных колебаниях объекта локации, вызванных лоцирующим сигналом. Не разница волновых сопротивлений сравниваемых материалов, а разница скоростей сдвиговых волн определяет эффективность распознавания. Спектры одинаковых по размеру объектов имеют средние периоды осцилляций, величина которых зависит от способности мишеней рассеивать локационный сигнал. При этом надежность различения зависит от разницы средних периодов осцилляций и не зависит от их абсолютной величины [14, 15]. В работах [11, 20, 21], в которых использовался смоделированный импульс, имитирующий локационный сигнал дельфина, были получены результаты, которые подтвердили эти выводы.
Н.А.Дубровским была сформулирована гипотеза [14] о механизмах, лежащих в основе различения дельфинами объектов локации, отличающихся между собой по размеру и материалу. Суть гипотезы заключается в том, что различение объектов возможно в том случае, когда в слуховой системе животного происходит анализ спектра эха, в котором содержится информация о собственных колебаниях объекта локации, вызванных лоцирующим сигналом. Не разница волновых сопротивлений сравниваемых материалов, а разница скоростей сдвиговых волн определяет эффективность распознавания. Спектры одинаковых по размеру объектов имеют средние периоды осцилляций, величина которых зависит от способности мишеней рассеивать локационный сигнал. При этом надежность различения зависит от разницы средних периодов осцилляций и не зависит от их абсолютной величины [14, 15]. В работах [11, 20, 21], в которых использовался смоделированный импульс, имитирующий локационный сигнал дельфина, были получены результаты, которые подтвердили эти выводы. Однако гипотеза, высказанная Н.А.Дубровским, имеет определенные ограничения ее применения из-за функциональных особенностей слуховой системы дельфина. Чувствительность слуха дельфина к изрезанности спектра эхосигнала ограничена числом периодов осцилляций. Один период и более ста не могут быть обработаны слуховой системой животного. Более того, дальнейшие исследования автора гипотезы показали, что животные могут находить дополнительные признаки в сигнале. К настоящему времени становится очевидно, что единый механизм работы локатора дельфина при различении им свойств объектов не установлен. В данной работе была предпринята попытка выяснить специфику отраженного сигнала при решении животным достаточно сложных акустических задач локационного распознавания свойств объектов с применением нового методического приема, а именно, когда объектом различения становится не один объект локации, а целый класс объектов, объединенных по определенному признаку [22]. В наших опытах использовались мишени (шары), различного диаметра — 11, 16, 21, 30 мм, изготовленные из различных материалов — стали, латуни и эбонита.
Однако гипотеза, высказанная Н.А.Дубровским, имеет определенные ограничения ее применения из-за функциональных особенностей слуховой системы дельфина. Чувствительность слуха дельфина к изрезанности спектра эхосигнала ограничена числом периодов осцилляций. Один период и более ста не могут быть обработаны слуховой системой животного. Более того, дальнейшие исследования автора гипотезы показали, что животные могут находить дополнительные признаки в сигнале. К настоящему времени становится очевидно, что единый механизм работы локатора дельфина при различении им свойств объектов не установлен. В данной работе была предпринята попытка выяснить специфику отраженного сигнала при решении животным достаточно сложных акустических задач локационного распознавания свойств объектов с применением нового методического приема, а именно, когда объектом различения становится не один объект локации, а целый класс объектов, объединенных по определенному признаку [22]. В наших опытах использовались мишени (шары), различного диаметра — 11, 16, 21, 30 мм, изготовленные из различных материалов — стали, латуни и эбонита. В экспериментах участвовали три дельфина афалины, ранее обученные акустическим экспериментам. Эксперимент проходил в сетевом вольере открытой бухты моря по двигательной методике с пищевым подкреплением. Методика проведения эксперимента была такова: предварительно животное обучалось с целью формирования у него понятия класса объектов локации. Для каждого животного понятие класса определялось материалом: либо сталь, либо латунь, либо эбонит. Опыты проводились таким образом, что положительным для животного был всегда один класс материалов, а два других были отрицательными. Для того, чтобы установить те информационные признаки в отраженном сигнале, на которые опирается слуховая система дельфина, сравнивали результаты поведенческих реакций животных с данными по аттестации объектов локации импульсами, имитирующими сигналы дельфина, которые могли служить информационными признаками при формировании понятия «класс» [11, 20]. Обработка спектров эхосигналов показала их большую вариабельность по форме огибающей, по степени изрезанности, количеству энергетических максимумов, выраженности осцилляций.
В экспериментах участвовали три дельфина афалины, ранее обученные акустическим экспериментам. Эксперимент проходил в сетевом вольере открытой бухты моря по двигательной методике с пищевым подкреплением. Методика проведения эксперимента была такова: предварительно животное обучалось с целью формирования у него понятия класса объектов локации. Для каждого животного понятие класса определялось материалом: либо сталь, либо латунь, либо эбонит. Опыты проводились таким образом, что положительным для животного был всегда один класс материалов, а два других были отрицательными. Для того, чтобы установить те информационные признаки в отраженном сигнале, на которые опирается слуховая система дельфина, сравнивали результаты поведенческих реакций животных с данными по аттестации объектов локации импульсами, имитирующими сигналы дельфина, которые могли служить информационными признаками при формировании понятия «класс» [11, 20]. Обработка спектров эхосигналов показала их большую вариабельность по форме огибающей, по степени изрезанности, количеству энергетических максимумов, выраженности осцилляций. Оказалось, что особенность спектральной структуры отраженного сигнала не влияет на вероятность правильного распознавания мишеней. Полученные результаты свидетельствуют о том, что высокая вероятность обнаруживается тогда, когда спектры сигналов были сходными, а при различных спектрах вероятность была низкой, что противоречит имеющимся в настоящее время данным о значимости спектральных характеристик отраженного сигнала (Рис. 2, 3) [11, 14, 15]. Известно, что отраженный от объекта локации сигнал состоит из первичной компоненты, которая является отражением от поверхности мишени и по форме идентично зондирующему импульсу, и вторичной компоненты, задержанной относительно первичного эха на определенное время. Расчеты показали, что эффективность распознавания мишеней в условно-рефлекторных опытах не зависит от временных соотношений между компонентами эхосигнала, что противоречит тем исследованиям, утверждающим, что величина временного интервала между первичным и вторичным эхо (Рис. 4) является признаком распознавания мишеней.
Оказалось, что особенность спектральной структуры отраженного сигнала не влияет на вероятность правильного распознавания мишеней. Полученные результаты свидетельствуют о том, что высокая вероятность обнаруживается тогда, когда спектры сигналов были сходными, а при различных спектрах вероятность была низкой, что противоречит имеющимся в настоящее время данным о значимости спектральных характеристик отраженного сигнала (Рис. 2, 3) [11, 14, 15]. Известно, что отраженный от объекта локации сигнал состоит из первичной компоненты, которая является отражением от поверхности мишени и по форме идентично зондирующему импульсу, и вторичной компоненты, задержанной относительно первичного эха на определенное время. Расчеты показали, что эффективность распознавания мишеней в условно-рефлекторных опытах не зависит от временных соотношений между компонентами эхосигнала, что противоречит тем исследованиям, утверждающим, что величина временного интервала между первичным и вторичным эхо (Рис. 4) является признаком распознавания мишеней. Анализ временных микроинтервалов в первичном и вторичном эхо показывает, что при высокой степени относительного различия, дельфин эффективно идентифицирует мишени (Рис.5). Корреляционный анализ показал, что степень корреляции между временной структурой вторичного эха и эффективностью работы сонара в поведенческих опытах довольно высока. Корреляция в первичном эхо не обнаружена. Таким образом, выявлена значимость временной компоненты эхосигнала при решении животным задач классификации объектов, что ранее было не известным механизмом в работе локатора дельфина при решении им задач распознавания объектов по размеру и материалу, что свидетельствует о том, что сонар дельфина использует различные механизмы обработки акустической информации. На рис.5 введены следующие обозначения. По оси ординат: К — коэффициент степени относительного различия мишеней (%), p — вероятность различия мишеней в поведенческих опытах (%). По оси абсцисс — диаметр мишеней (d, мм), K1 — коэффициент различения мишеней по временны́м интервалам первичного эха, K2 — для вторичного эха, r1cp — степень корреляции временны́х интервалов первичного эха с эффективностью распознавания мишеней в поведенческих опытах, r2cp — то же для вторичного эха.
Анализ временных микроинтервалов в первичном и вторичном эхо показывает, что при высокой степени относительного различия, дельфин эффективно идентифицирует мишени (Рис.5). Корреляционный анализ показал, что степень корреляции между временной структурой вторичного эха и эффективностью работы сонара в поведенческих опытах довольно высока. Корреляция в первичном эхо не обнаружена. Таким образом, выявлена значимость временной компоненты эхосигнала при решении животным задач классификации объектов, что ранее было не известным механизмом в работе локатора дельфина при решении им задач распознавания объектов по размеру и материалу, что свидетельствует о том, что сонар дельфина использует различные механизмы обработки акустической информации. На рис.5 введены следующие обозначения. По оси ординат: К — коэффициент степени относительного различия мишеней (%), p — вероятность различия мишеней в поведенческих опытах (%). По оси абсцисс — диаметр мишеней (d, мм), K1 — коэффициент различения мишеней по временны́м интервалам первичного эха, K2 — для вторичного эха, r1cp — степень корреляции временны́х интервалов первичного эха с эффективностью распознавания мишеней в поведенческих опытах, r2cp — то же для вторичного эха. Исследования локационного аппарата дельфина, начались в конце 50-х — начале 60-х годов прошлого столетия, когда были проведены первые опыты для доказательства самого факта существования эхолокационного феномена. Дальнейшие исследования существенно расширили наши сведения о сонаре дельфина. Наиболее точные и качественные работы относятся к самому последнему времени, когда была создана адекватная аппаратура для приёма, усиления, регистрации и обработки локационных сигналов, и были разработаны методические приёмы исследований. Хотя к настоящему времени, благодаря многолетним и многочисленным работам в лабораториях ряда стран мира накоплен большой экспериментальный материал, надо все-таки признать, что современных знаний об эхолокации морских млекопитающих недостаточно, в первую очередь мало изучены её биологические основы. Встаёт закономерный вопрос: какова же перспектива изучения эхолокации у морских млекопитающих? Открытие акустического способа ориентации у дельфинов не явилось принципиально новым с точки зрения технического прогресса.
Исследования локационного аппарата дельфина, начались в конце 50-х — начале 60-х годов прошлого столетия, когда были проведены первые опыты для доказательства самого факта существования эхолокационного феномена. Дальнейшие исследования существенно расширили наши сведения о сонаре дельфина. Наиболее точные и качественные работы относятся к самому последнему времени, когда была создана адекватная аппаратура для приёма, усиления, регистрации и обработки локационных сигналов, и были разработаны методические приёмы исследований. Хотя к настоящему времени, благодаря многолетним и многочисленным работам в лабораториях ряда стран мира накоплен большой экспериментальный материал, надо все-таки признать, что современных знаний об эхолокации морских млекопитающих недостаточно, в первую очередь мало изучены её биологические основы. Встаёт закономерный вопрос: какова же перспектива изучения эхолокации у морских млекопитающих? Открытие акустического способа ориентации у дельфинов не явилось принципиально новым с точки зрения технического прогресса. К тому времени человек уже имел ряд приборов — эхолот, гидролокатор, радиолокатор, работающие по аналогичному принципу. Возможно даже, что открытие эхолокации произошло именно потому, что сознание исследователей было уже подготовлено предшествующими техническими достижениями. Тем не менее, интерес со стороны физиков и инженеров к «живым локаторам» сохраняется. Что же можно получить в результате расшифровки конструкций биологической модели эхолокации? Следует отметить, что между сонарами животных и техническими радио и гидролокационными системами, созданными человеком, существует принципиальное сходство: излучение квантов энергии, определение по эху наличия объекта и расстояния до него, использование высоких частот и коротких сигналов. Сравнение дальности действия этих систем будет не в пользу природы, однако, по многим другим показателям «живые локаторы» вызывают зависть инженеров — сверхминиатюрностью конструкций с высокой разрешающей способностью и помехоустойчивостью. До настоящего времени сохраняется значительный интерес специалистов, занимающихся решением технических проблем к тому, каким образом они решены в живой природе.
К тому времени человек уже имел ряд приборов — эхолот, гидролокатор, радиолокатор, работающие по аналогичному принципу. Возможно даже, что открытие эхолокации произошло именно потому, что сознание исследователей было уже подготовлено предшествующими техническими достижениями. Тем не менее, интерес со стороны физиков и инженеров к «живым локаторам» сохраняется. Что же можно получить в результате расшифровки конструкций биологической модели эхолокации? Следует отметить, что между сонарами животных и техническими радио и гидролокационными системами, созданными человеком, существует принципиальное сходство: излучение квантов энергии, определение по эху наличия объекта и расстояния до него, использование высоких частот и коротких сигналов. Сравнение дальности действия этих систем будет не в пользу природы, однако, по многим другим показателям «живые локаторы» вызывают зависть инженеров — сверхминиатюрностью конструкций с высокой разрешающей способностью и помехоустойчивостью. До настоящего времени сохраняется значительный интерес специалистов, занимающихся решением технических проблем к тому, каким образом они решены в живой природе. В процессе биологической эволюции живые организмы, приспосабливаясь к окружающей среде в интересах выживания данного биологического вида, смогли более или менее оптимально, в техническом смысле, разрешить проблемы, аналогичные стоящим теперь перед инженерами. Подход к изучению живых организмов с позиций техники оказался полезным, поскольку он стимулирует как биологические исследования, так и техническую мысль.
В процессе биологической эволюции живые организмы, приспосабливаясь к окружающей среде в интересах выживания данного биологического вида, смогли более или менее оптимально, в техническом смысле, разрешить проблемы, аналогичные стоящим теперь перед инженерами. Подход к изучению живых организмов с позиций техники оказался полезным, поскольку он стимулирует как биологические исследования, так и техническую мысль.Использование радара, сонара и эхолокации для «видеть»
Способность видеть видимые световые волны может быть полезной для определения размера, формы, расстояния и скорости объектов в окружающей среде. Но во многих ситуациях полагаться на зрение может быть не лучшим вариантом для дистанционного обнаружения объектов. Например, у большинства животных нет глаз на затылке; многие плохо видят ночью; а некоторые живут в глубинах океана, куда не проникает видимый свет. Тем не менее, эти условия не мешают способности чувствовать объекты для многих животных. Итак, как люди и другие животные «видят» удаленные объекты, не завися от использования зрения?
Один из ответов заключается в том, что существуют и другие типы волн за пределами видимого света, и животные разработали методы их обнаружения. Два из этих методов, сонар и радар, представляют собой искусственные системы обнаружения, которые позволяют нам «видеть» то, что наши глаза не могут видеть. Другой, эхолокация, является естественным способом для некоторых животных обнаруживать движение с помощью звуковых волн.
Два из этих методов, сонар и радар, представляют собой искусственные системы обнаружения, которые позволяют нам «видеть» то, что наши глаза не могут видеть. Другой, эхолокация, является естественным способом для некоторых животных обнаруживать движение с помощью звуковых волн.
Радар
Радар — это система, используемая для обнаружения, определения местоположения, отслеживания и распознавания объектов на значительном расстоянии. R.A.D.A.R — это аббревиатура от «радиообнаружение и определение дальности». Первоначально он был разработан в 1930-х и 1940-х годов для использования в военных целях, но теперь он также широко используется в гражданских целях. Некоторые из этих применений включают наблюдение за погодой, управление воздушным движением и наблюдение за другими планетами.
Радар управления воздушным движением.
Радар работает, посылая радиоволны, разновидность электромагнитных волн, в виде импульсов через радиопередатчик. Волны отражаются от объектов на своем пути обратно к приемнику, который может обнаруживать эти отражения.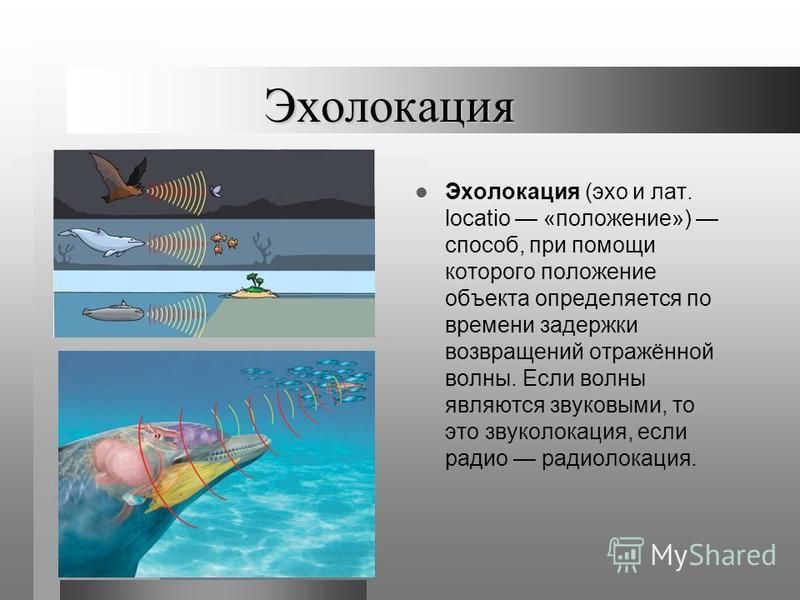 Радарные устройства обычно используют одну и ту же антенну для передачи и приема, что означает, что устройство переключается между активным и пассивным режимом. Полученная информация о радиоволнах может помочь наблюдателям определить расстояние и местоположение объекта, скорость его движения относительно приемника, направление движения, а иногда и форму и размер объектов.
Радарные устройства обычно используют одну и ту же антенну для передачи и приема, что означает, что устройство переключается между активным и пассивным режимом. Полученная информация о радиоволнах может помочь наблюдателям определить расстояние и местоположение объекта, скорость его движения относительно приемника, направление движения, а иногда и форму и размер объектов.
Радиоволны имеют самую большую длину волны и самую низкую частоту среди всех электромагнитных волн. Поскольку они движутся медленнее и требуют меньше энергии, они хорошо передвигаются в неблагоприятных погодных условиях, таких как туман, дождь, снег и т. д. Системы обнаружения, такие как лидар, которые работают в инфракрасном и видимом диапазонах с более короткими длинами волн и более высокими частотами, плохо работают в таких условиях.
Хотя радар может эффективно перемещаться в различных условиях окружающей среды или вокруг них, под водой он гораздо менее эффективен. Электромагнитные волны радара поглощаются большими водоемами в пределах фута от передачи. Вместо этого мы используем Sonar в подводных приложениях.
Вместо этого мы используем Sonar в подводных приложениях.
Sonar
S.O.N.A.R, аббревиатура от «звуковая навигация и определение дальности», представляет собой систему, аналогичную радару, с точки зрения передачи и приема волн через импульсы для определения расстояния и скорости. Однако он работает за счет использования звуковых волн и очень эффективен под водой.
Звуковые волны — это механические волны, то есть колебания, или возвратно-поступательные движения материи с постоянной скоростью. Когда механическая волна сталкивается с препятствием или достигает конца среды, в которой распространяется, некоторая часть волны отражается обратно в исходную среду. Вода оказывается фантастической средой — хотя и медленной — для переноса механических волн на большие расстояния, что делает Sonar лучшим выбором для обнаружения подводных объектов.
Эхолокация
Эхолокация — это естественный метод передачи и обнаружения звуковых волн, используемый животными для достижения той же цели обнаружения объектов. Хотя эхолокация иногда называется гидролокатором в случайном разговоре, для ее работы не требуется никаких искусственных устройств, и она используется как над водой, так и под водой. Животные используют эхолокацию, посылая перед собой звуковые волны в воздухе или воде. Затем они могут определять информацию об объектах на своем пути по эхо-сигналам, возникающим при отражении этих звуков.
Хотя эхолокация иногда называется гидролокатором в случайном разговоре, для ее работы не требуется никаких искусственных устройств, и она используется как над водой, так и под водой. Животные используют эхолокацию, посылая перед собой звуковые волны в воздухе или воде. Затем они могут определять информацию об объектах на своем пути по эхо-сигналам, возникающим при отражении этих звуков.
Эхолокация может быть использована любым животным, обладающим способностями к воспроизведению звука и сенсорному восприятию. Известно, что люди разработали методы систематического постукивания тростью или щелкания языком, чтобы производить звуки, необходимые для эхолокации. Однако чаще всего эхолокация связана с использованием ультразвука нечеловеческими животными. Ультразвук — это звук, частота механических волн которого выше, чем может уловить человеческое ухо, хотя они действуют так же, как слышимые звуковые волны.
Летучие мыши — одни из самых известных пользователей эхолокации. Они используют относительно высокие, в основном ультразвуковые волны, и некоторые из них могут создавать эхолокационные звуки до 140 децибел — выше, чем военный самолет, взлетающий всего в 100 футах от вас.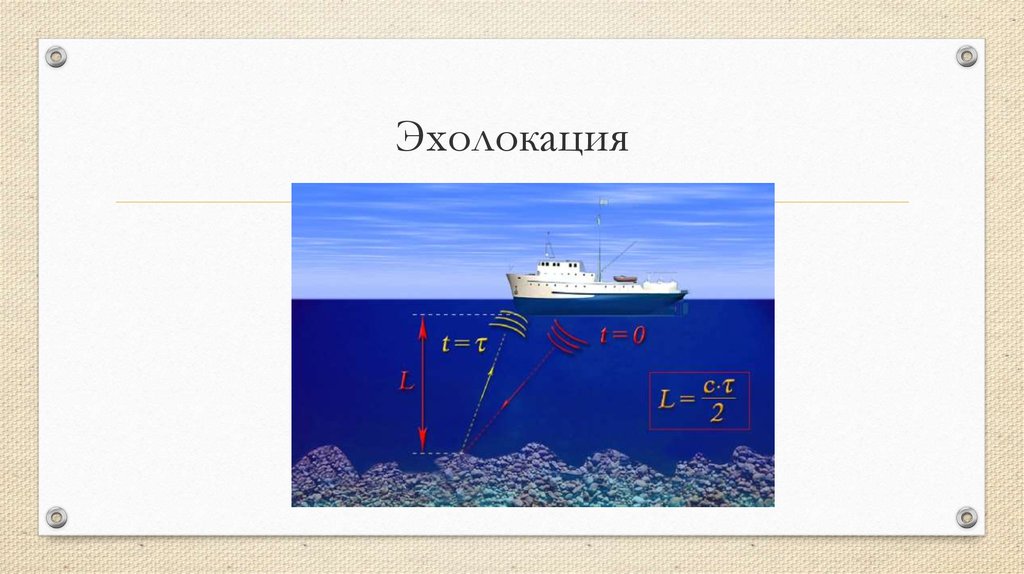 Чтобы справиться с такими интенсивными колебаниями звуковых волн, летучие мыши отключают средние уши непосредственно перед криком, чтобы не быть оглушенными собственными криками. Они используют мышцы среднего уха, чтобы раздвигать кости, которые передают звуковые волны во внутреннее ухо, не оставляя звуковым волнам пути для повреждения улитки. Подобно радарным устройствам, переключающимся между активными передатчиками и пассивными приемниками, летучие мыши восстанавливают свой полный слух через долю секунды, чтобы услышать эхо.
Чтобы справиться с такими интенсивными колебаниями звуковых волн, летучие мыши отключают средние уши непосредственно перед криком, чтобы не быть оглушенными собственными криками. Они используют мышцы среднего уха, чтобы раздвигать кости, которые передают звуковые волны во внутреннее ухо, не оставляя звуковым волнам пути для повреждения улитки. Подобно радарным устройствам, переключающимся между активными передатчиками и пассивными приемниками, летучие мыши восстанавливают свой полный слух через долю секунды, чтобы услышать эхо.
Большинство из более чем 1300 видов летучих мышей используют эхолокацию для охоты и навигации в условиях плохой освещенности. Ископаемые свидетельства указывают на то, что эта способность развилась у летучих мышей по крайней мере 52 миллиона лет назад. Они могут обнаружить насекомое на расстоянии до 15 футов и определить его размер, форму, твердость и направление движения благодаря умелому использованию эхолокации.
Эхо волн
Животные уже давно могут обнаруживать объекты на расстоянии, манипулируя невидимыми волнами с помощью таких технологий, как радар и гидролокатор или естественная эхолокация. Хотя каждый из этих методов работает немного по-разному и основан на различных формах, размерах и типах волн, каждый из них работает, излучая волны, а затем определяя характеристики на основе эха этих волн.
Хотя каждый из этих методов работает немного по-разному и основан на различных формах, размерах и типах волн, каждый из них работает, излучая волны, а затем определяя характеристики на основе эха этих волн.
Попробуйте дома
Отойдите в угол тихой комнаты и закройте глаза. Не слишком сильно двигая телом, попробуйте повернуть голову, издавая щелкающие звуки ртом. Можете ли вы сказать, когда вы больше повернуты к стене или есть ли какие-либо объекты рядом с вами, по тому, как меняется звук щелчка? Попробуйте держать руку перед лицом и двигать ею вперед-назад, пока вы щелкаете. Можете ли вы сказать, как далеко он находится или в каком направлении он движется по звуку? Проявите творческий подход и попробуйте с разными типами объектов и в разных местах!
Джейн Талер — ведущий программы Gallery Experience в отделе непрерывного обучения CMNH. Сотрудникам музея, волонтерам и стажерам предлагается вести блоги о своем уникальном опыте и знаниях, полученных во время работы в музее.
Связанный контент
Супер кальмар! Летающие чудеса природы
Причудливые перья: необъяснимая сложность в истории эволюции
Спросите ученого : В чем разница между воронами и воронами?
Эхолокация — это встроенный в природу гидролокатор. Вот как это работает.
Северные китообразные дельфины плавают прямо под поверхностью недалеко от Британской Колумбии, Канада. Эхолокация — логичная стратегия в океане, где звук распространяется в пять раз быстрее, чем в воздухе.
Фотография Пола Никлена, Коллекция изображений Nat Geo
Пожалуйста, соблюдайте авторские права. Несанкционированное использование запрещено.
Собственная сонарная система природы, эхолокация возникает, когда животное излучает звуковую волну, которая отражается от объекта, возвращая эхо, которое предоставляет информацию о расстоянии и размере объекта.
Эхолокируют более тысячи видов, включая большинство летучих мышей, всех зубатых китов и мелких млекопитающих. Многие из них ведут ночной образ жизни, роют норы и обитают в океане и полагаются на эхолокацию, чтобы найти пищу в условиях почти полного отсутствия света. У животных есть несколько способов эхолокации, от вибрации горла до взмахов крыльями.
Многие из них ведут ночной образ жизни, роют норы и обитают в океане и полагаются на эхолокацию, чтобы найти пищу в условиях почти полного отсутствия света. У животных есть несколько способов эхолокации, от вибрации горла до взмахов крыльями.
Ночные масляные птицы и некоторые стрижи, некоторые из которых охотятся в темных пещерных условиях, «издают короткие щелчки сиринксом, голосовым органом птиц», — говорит Кейт Аллен, научный сотрудник отдела психологических исследований и исследований мозга Университета Джона Хопкинса. , говорит по электронной почте.
Некоторые люди также могут осуществлять эхолокацию, щелкая языком. Такое поведение характерно лишь для некоторых других животных, включая тенреков, землероек, обитающих на Мадагаскаре, и вьетнамских карликовых сонь-соней, которые фактически слепы.
Сигналы летучих мышей Летучие мыши — идеальное животное для эхолокации, использующее встроенный гидролокатор для преследования быстро летящей добычи ночью.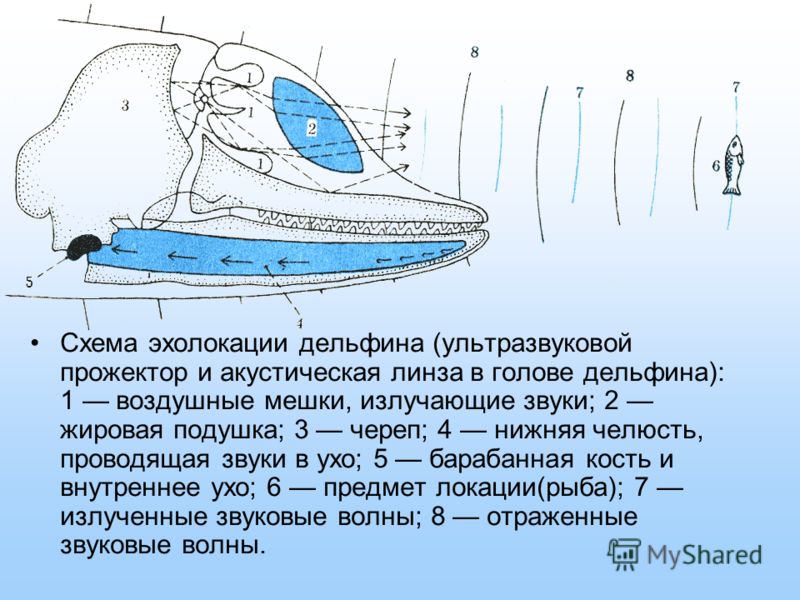
Большинство летучих мышей, таких как крошечная летучая мышь Добентона, сокращают мышцы гортани, чтобы издавать звуки, превышающие диапазон человеческого слуха, — забавный эквивалент крика, говорит Аллен. (См.: Когда дело доходит до эхолокации, некоторые летучие мыши просто летают.)
Крики летучих мышей сильно различаются у разных видов, что позволяет им различать их голоса среди других летучих мышей по соседству. Их крики также зависят от конкретной среды и типа добычи: европейская летучая мышь «шепчет» в присутствии мотыльков, чтобы избежать обнаружения.
Некоторые мотыльки, тем не менее, выработали собственную защиту от эхолокационных летучих мышей. Тигровая бабочка сгибает барабанный орган по обеим сторонам грудной клетки, издавая щелчки, которые блокируют сонар летучих мышей и удерживают хищников в страхе.
Как опытные эхолокаторы, некоторые летучие мыши могут ориентироваться на объектах размером всего 0,007 дюйма, что примерно равно ширине человеческого волоса.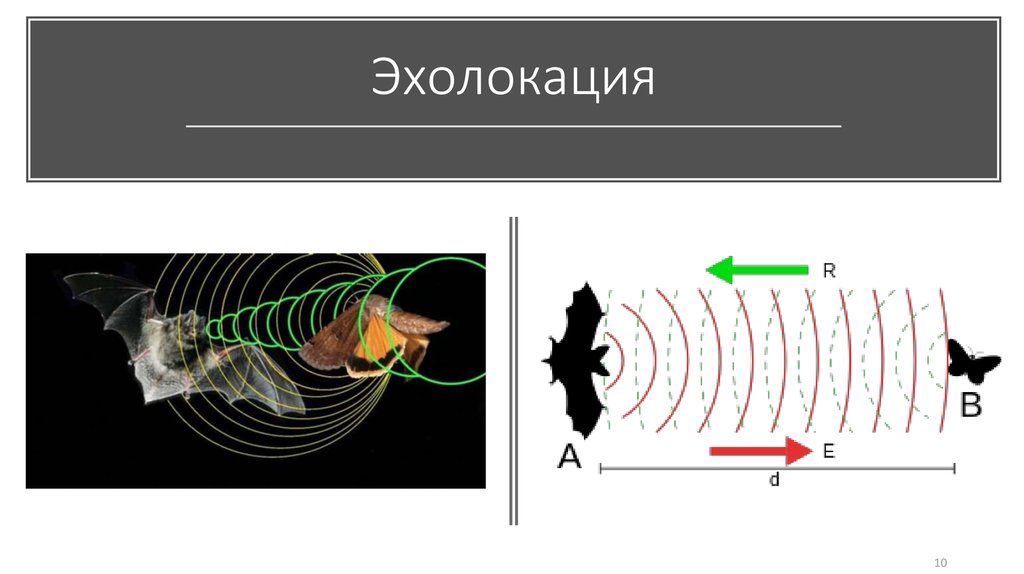 Поскольку насекомые всегда в движении, летучим мышам приходится непрерывно щелкать, иногда делая 190 кликов в секунду. Даже с такой трудной добычей хищники могут каждую ночь съедать половину своего веса насекомых.
Поскольку насекомые всегда в движении, летучим мышам приходится непрерывно щелкать, иногда делая 190 кликов в секунду. Даже с такой трудной добычей хищники могут каждую ночь съедать половину своего веса насекомых.
Листоносые летучие мыши издают эхолокационные сигналы с помощью своих больших, замысловато сложенных носов, что помогает фокусировать звуки, которые отражаются назад. Некоторые виды также могут быстро менять форму своих ушей, чтобы точно улавливать входящие сигналы.
Некоторые фруктовые летучие мыши, такие как малая утренняя летучая мышь из Южной Азии, даже издают щелчки, взмахивая крыльями, что является недавним открытием.
Звуковые волны океанаЭхолокация — это логическая стратегия в океане, где звук распространяется в пять раз быстрее, чем в воздухе.
Дельфины и другие зубатые киты, такие как белуха, эхолокируют с помощью специального органа, называемого спинной сумкой, который находится на макушке их головы, рядом с дыхалом. (Прочитайте, как у китов есть «луч гидролокатора» для нацеливания на добычу.)
(Прочитайте, как у китов есть «луч гидролокатора» для нацеливания на добычу.)
Жировые отложения в этой области, называемой дыней, уменьшают импеданс или сопротивление звуковым волнам между телом дельфина и водой, делая звук более четким, говорит Ву-Юнг Ли, старший океанограф Вашингтонского университета прикладной физики. Лаборатория.
Еще одно жировое отложение, простирающееся от нижней челюсти кита до его уха, уточняет эхо, возвращающееся от добычи, такой как рыба или кальмар.
Морские свиньи, излюбленная добыча косаток, издают чрезвычайно быстрые высокочастотные эхолокационные щелчки, которые их хищники не слышат, что позволяет им оставаться инкогнито.
Звуки эхолокации большинства морских млекопитающих слишком высоки для человека, за исключением кашалотов, косаток и некоторых видов дельфинов, добавляет Ли.
Навигация по звуку Помимо охоты или самообороны, некоторые животные используют эхолокацию для навигации по местам обитания.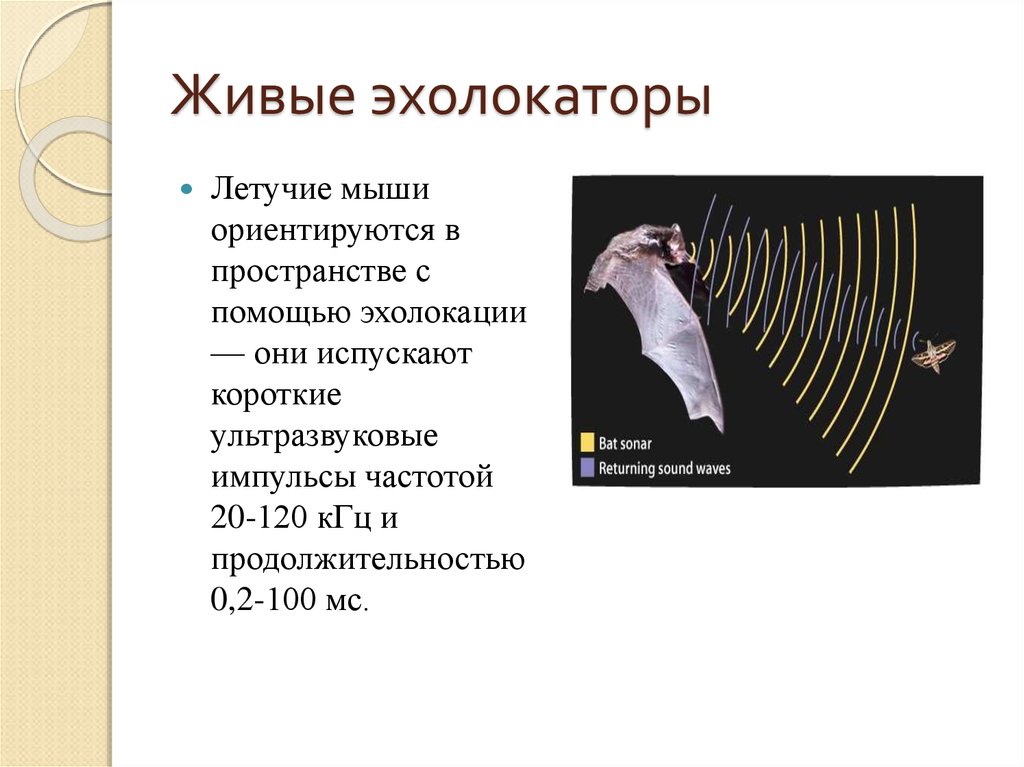
Например, большие коричневые летучие мыши, широко распространенные по всей Америке, используют свой гидролокатор, чтобы прокладывать себе путь в шумной среде, например, в лесах, наполненных криками других животных.
Дельфины реки Амазонки также могут использовать эхолокацию, чтобы перемещаться вокруг ветвей деревьев и других препятствий, созданных сезонными наводнениями, говорит Ли.
Большинство людей, использующих эхолокацию, слепы или слабовидящие и используют этот навык в повседневной жизни. Некоторые делают щелчки либо языком, либо предметом, например тростью, а затем перемещаются по полученному эху. Сканирование мозга людей, использующих эхолокацию, показывает, что часть мозга, которая обрабатывает зрение, задействована во время этого процесса. (Прочитайте, как слепые люди используют сонар.)
«Мозгу не нравится незастроенная недвижимость, — говорит Аллен, — поэтому поддерживать эхолокацию у людей, которым она не нужна, «слишком метаболически затратно».
Несмотря на это, люди замечательно адаптируются, и исследования показывают, что, проявив терпение, мы можем научиться эхолокации.
Читать дальше
Как происходят гибриды животных, от лигеров до зорсов
- Животные
Как происходят гибриды животных, от лигеров до зорсов загадки эволюции.
Является ли Алжир следующим популярным местом для путешествий в Африке?
- Путешествия
Является ли Алжир следующим популярным местом для путешествий в Африке?
Древние города-крепости, римские руины и пески Сахары делают крупнейшую страну Африки неизведанным туристическим гигантом, скрывающимся у всех на виду.
Спасает ли река строительство большего количества плотин?
- Окружающая среда
Спасает ли река строительство большего количества плотин?
По мере того, как реки бушуют или исчезают из-за экстремальных погодных условий, вызванных изменением климата, усиливаются дебаты о том, какую роль плотины должны или не должны играть в управлении ими.
Эксклюзивный контент для подписчиков
Почему люди так одержимы Марсом?
Как вирусы формируют наш мир
Эпоха собачьих бегов в США подходит к концу будет исследовать красную планету
Почему люди так одержимы Марсом?
Как вирусы формируют наш мир
Эпоха собачьих бегов в США подходит к концу
Узнайте, как люди представляли себе жизнь на Марсе на протяжении всей истории будет исследовать красную планету
Почему люди так одержимы Марсом?
Как вирусы формируют наш мир
Эпоха собачьих бегов в США подходит к концу
Узнайте, как люди представляли себе жизнь на Марсе на протяжении всей истории
Узнайте, как новый марсоход НАСА будет исследовать красную планету
Подробнее
Летучие мыши слепы? | Спросите у биолога
показать/скрыть слова, чтобы узнать
Эхо: звуковая волна, возвращающаяся после столкновения с объектом
Электромагнитное: связанное с электрическими или магнитными полями
Навигация: , чтобы найти дорогу.
Звуковая волна: звук, невидимый для людей, который путешествует в космосе
Ультразвук: звук, который люди не могут слышать.
Что такое эхолокация?
Эхолокация — это использование звуковых волн и эха для определения местоположения объектов в пространстве. Летучие мыши используют эхолокацию для навигации и поиска пищи в темноте. Для эхолокации летучие мыши испускают звуковые волны изо рта или носа. Когда звуковые волны достигают объекта, они создают эхо. Эхо отражается от объекта и возвращается к ушам летучих мышей. Летучие мыши слушают эхо, чтобы понять, где находится объект, насколько он велик и какой формы.
Используя эхолокацию, летучие мыши могут обнаруживать объекты толщиной с человеческий волос в полной темноте. Эхолокация позволяет летучим мышам находить насекомых размером с комара, которых любят есть многие летучие мыши. Летучие мыши не слепы, но они могут использовать эхолокацию, чтобы очень быстро ориентироваться в полной темноте.
Эхолокация летучих мышей, визуализированная. Звуки, которые издает летучая мышь, представлены желтыми звуковыми волнами; фиолетовые звуковые волны показывают звуковые волны, которые отражаются от мотылька. Летучая мышь использует эти возвращающиеся звуковые волны, чтобы определить местонахождение мотылька.
Какие звуки издают летучие мыши?
На следующем изображении показана сонограмма визга седовласой летучей мыши из Западного центра экологических исследований. В этой записи вы можете услышать стандартный повторный вызов, который предназначен для базовой навигации. Летучие мыши используют это, чтобы избежать столкновения с объектами. Скорее всего, более быстрое нажатие связано с тем, что летучая мышь обнаружила насекомое, и летучей мыши нужно больше точности, чтобы поймать добычу. Вы можете использовать проигрыватель ниже, чтобы прослушать звонок или получить mp3-файл здесь.
Ваш браузер не поддерживает этот аудиоэлемент.
Сонограмма или звуковой график, показывающий визг седовласой летучей мыши.
Знаете ли вы, что эхолокацией пользуются и другие животные? Дельфины, киты, землеройки и некоторые птицы используют эхолокацию для навигации и поиска пищи. Есть даже некоторые слепые люди, которые научились использовать эхолокацию для навигации в своем окружении.
Люди не могут слышать ультразвуковые звуки, издаваемые эхолокационными летучими мышами. Но есть насекомые, которые могут слышать эти ультразвуковые звуки. К таким насекомым относятся некоторые мотыльки, жуки и сверчки. Когда мотыльки слышат эхолокирующую летучую мышь, некоторые из них поворачиваются и улетают. Другие начнут летать зигзагом, спиралью или петлей, чтобы не быть съеденными летучей мышью. Известно, что некоторые сверчки и жуки издают щелкающие звуки, которые пугают летучих мышей и отпугивают их, избегая при этом быть съеденными.
Знаете ли вы, что гидролокационные и радарные навигационные системы, используемые военными, работают по принципу эхолокации летучих мышей? Инженеры даже использовали эхолокацию летучих мышей для улучшения своих конструкций. Как и эхолокация летучих мышей, сонар использует звуковые волны для навигации и определения местоположения таких объектов, как подводные лодки и корабли. Под водой используется только гидролокатор, а летучие мыши эхолокируют на открытом воздухе. Радар использует электромагнитные волны для определения местоположения таких объектов, как самолеты и корабли. Как и эхолокация летучих мышей, радар также используется на открытом воздухе.
Звуковые волны и отражение звука используются летучими мышами и дельфинами для эхолокации; этот процесс был изучен и использован для улучшения подводного гидролокатора, который мы используем на подводных лодках и других плавсредствах.
Подробнее о: Летучие мыши
View Citation
Библиографические данные:
- Статья: Эхолокация
- Автор(ы): Элизабет Хаген
- Издатель: Школа естественных наук Университета штата Аризона Ask A Biologist
- Название объекта: ASU — Спросите у биолога
- Дата публикации: 4 ноября 2009 г.
- Дата обращения: 14 октября 2022 г.
- Ссылка: https://askabiologist.asu.edu/echolocation
APA Style
Элизабет Хаген. (2009, 04 ноября). Эхолокация. АГУ — Спросите у биолога. Получено 14 октября 2022 г. с сайта https://askabiologist.asu.edu/echolocation
Американской психологической ассоциации. Для получения дополнительной информации см. http://owl.english.purdue.edu/owl/resource/560/10/9.0003
Чикагское руководство по стилю
Элизабет Хаген. «Эхолокация». АГУ — Спросите у биолога. 04 ноября 2009 г. https://askabiologist.asu.edu/echolocation
Для получения дополнительной информации см. http://owl.english.purdue.edu/owl/resource/717/04/
MLA 2017 Style
Элизабет Хаген. «Эхолокация». АГУ — Спросите у биолога. 04 ноября 2009 г. ASU — Спросите биолога, Интернет. 14 октября 2022 г. https://askabiologist.asu.edu/echolocation
Ассоциация современного языка, 7-е изд. Для получения дополнительной информации см.